RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-Time Multidirectional Modal Analysis Using High-Speed Vision
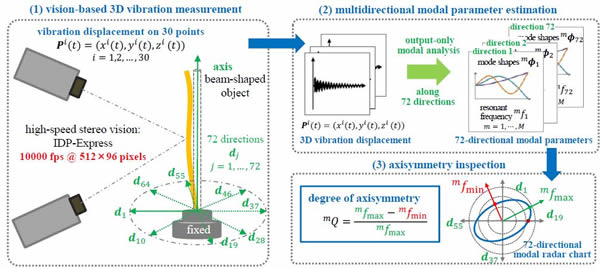
In this study, we develop a dynamics-based visual inspection system that can simultaneously estimate the multidirectional modal parameters of a 3D beam object under unknown excitations in the audio-frequency range.
Our system can measure the 3D vibration distribution on a beam-shaped object by processing 512×96 stereo images at 10000 fps in real time.
The system can determine the object’s resonant frequencies and mode shapes along 72 directions around its axis for inspecting its asymmetric dynamic properties, caused by cracks, of several steel cantilever beams vibrating at hundreds of hertz were inspected in real time by estimating their modal parameters along the 72 directions around their beam axes.
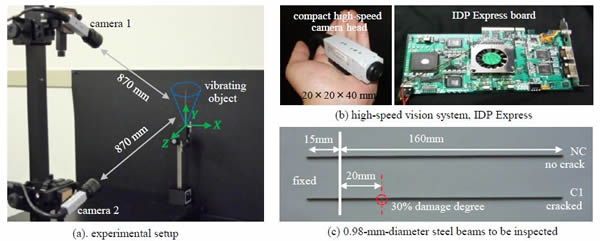
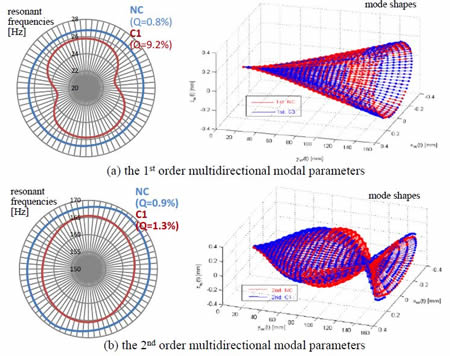
In the experiment,0.98-mm-diameter steel beams were inspected using high-speed stereo vision system (IDP Express). The 3D shape measurement was accelerated by implementing column-moment calculation circuits on an FPGA on the IDP Express board; output-only modal parameter estimation was executed for the 72 directions using the SSI-CPAST method. When excitation was initiated by tapping the object with human finger, the 72-directional resonant frequencies and mode shapes of the steel beams were estimated in real time. The 1st-order resonant frequencies of the no-crack steel beam were axisymmetric around 26.7 Hz (within 1% deviation), whereas those of the cracked beam had a 9% deviation around 25.0 Hz in the 72 directions, corresponding to the crack location.
In the experiment,0.98-mm-diameter steel beams were inspected using high-speed stereo vision system (IDP Express). The 3D shape measurement was accelerated by implementing column-moment calculation circuits on an FPGA on the IDP Express board; output-only modal parameter estimation was executed for the 72 directions using the SSI-CPAST method. When excitation was initiated by tapping the object with human finger, the 72-directional resonant frequencies and mode shapes of the steel beams were estimated in real time. The 1st-order resonant frequencies of the no-crack steel beam were axisymmetric around 26.7 Hz (within 1% deviation), whereas those of the cracked beam had a 9% deviation around 25.0 Hz in the 72 directions, corresponding to the crack location.