研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速視覚を用いた実時間マルチディレクショナルモード解析
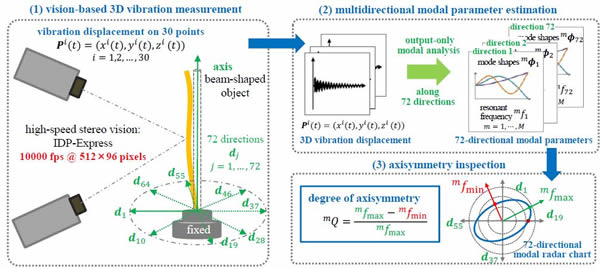
本研究では,音声周波数レベル加振下の三次元ビーム形状対象に対し,多方向のモードパラメータを瞬時推定するダイナミクスベースド画像検査システムを開発した.
開発システムでは,10000fpsで取得された512×96画素のステレオ画像からビーム形状対象の三次元振動分布を取得し,その情報に基づき,ビーム軸周りの72方向に対する共振周波数及びモード波形を瞬時計算することを可能とした.
推定されたマルチディレクショナルなモードパラメータを用い,加振下における三次元ビーム形状の対象において,クラック等により生じた非対称なダイナミクス特性を瞬時検出を可能とした.
実験では,径0.98mmの鉄製ビームを高速ビジョンIDP Expressを用いて検査した. 三次元形状計測は,IDP Expressボード上のFPGAへの行モーメント計算回路の実装により高速化し,出力オンリーモード解析はSSI-CPAST法を用いて72方向に対し実装した. クラックのないビーム及びクラックのあるビームに対し,人の指によるタッピング加振を行った場合について,ビーム軸周りの72方向の共振周波数及びモード波形の実時間推定を行った. クラックのないビームの1次共振周波数はほぼ軸対称で26.7Hz(1%前後の偏り)であるのに対し,クラックのあるビームでは平均値が25.0Hz前後と低下し,クラック位置に相当した形で9%前後の逸脱が観測され,クラックによる非対称なダイナミクス特性が観測された.
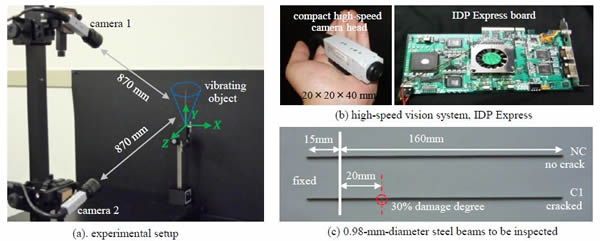
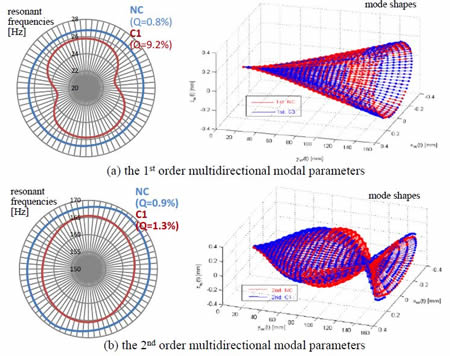
実験では,径0.98mmの鉄製ビームを高速ビジョンIDP Expressを用いて検査した. 三次元形状計測は,IDP Expressボード上のFPGAへの行モーメント計算回路の実装により高速化し,出力オンリーモード解析はSSI-CPAST法を用いて72方向に対し実装した. クラックのないビーム及びクラックのあるビームに対し,人の指によるタッピング加振を行った場合について,ビーム軸周りの72方向の共振周波数及びモード波形の実時間推定を行った. クラックのないビームの1次共振周波数はほぼ軸対称で26.7Hz(1%前後の偏り)であるのに対し,クラックのあるビームでは平均値が25.0Hz前後と低下し,クラック位置に相当した形で9%前後の逸脱が観測され,クラックによる非対称なダイナミクス特性が観測された.