研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
カタディオプトリック高速トラッキングを用いた単眼ステレオ計測
本研究では、毎秒数百の異なる視線へ高速切替可能とする、単一の超高速ミラードライブ型PT(パン・チルト)アクティブビジョンを用いた、カタディオプトリック実時間ステレオトラッキングの概念を提案する。
撮影、計算、および動作の高速化によって、アクティブビジョンシステムはミリ秒レベルでの超高速マルチスレッド視線制御を可能とし、2つ以上の異なる視野での追跡制御を実現できる。そこで、ミラー角をフレーム単位制御し、左右の仮想PTカメラとして同一対象への任意視点ステレオ画像を同時撮影可能な単一のアクティブビジョンシステムを提案した。
ガルバノミラーを基に実際に構築した単眼ステレオトラッキングシステムは、1秒間に500の異なる視野への切替制御を可能とし、カタディオプトリックアクティブステレオ撮影として、正確な三次元測定のために、8ビット濃淡512×512画像を左右それぞれ250fpsで取得するPTトラッキング仮想カメラによって、十分な視差で高速運動対象を機械的に追従制御を行う。
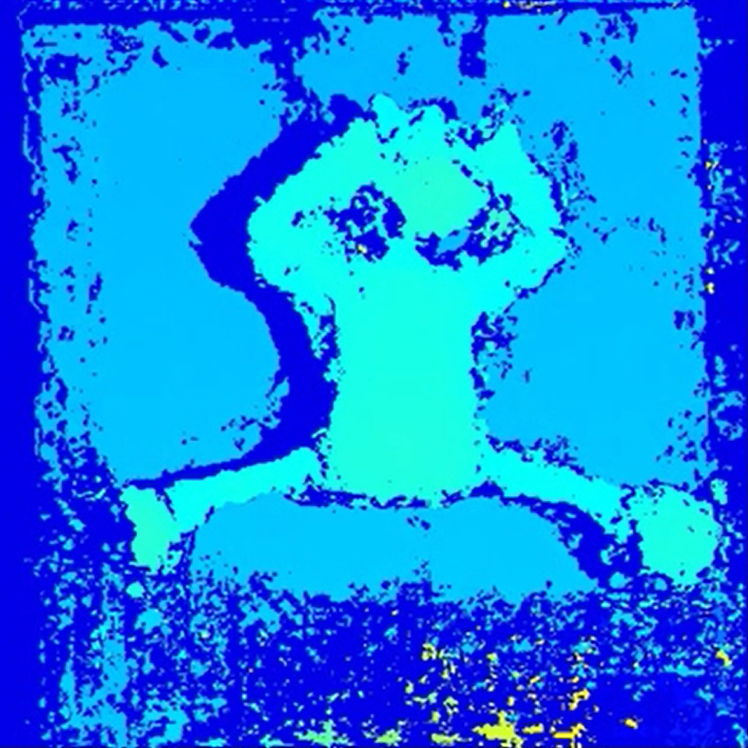
三次元空間内で動作する対象への複数の追跡実験を通して、構築した単眼ステレオ追跡システムの性能を実証した。
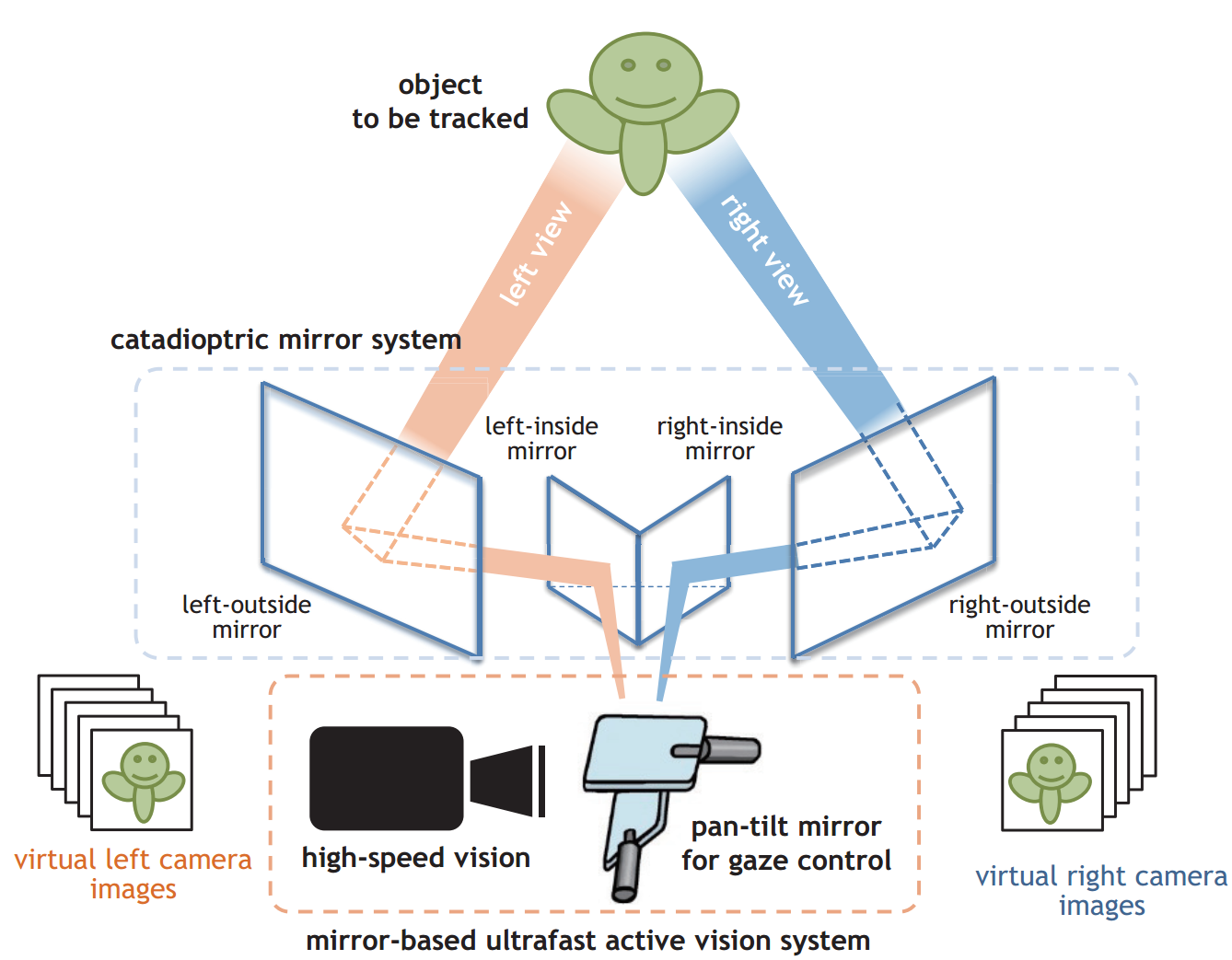 |
Concept
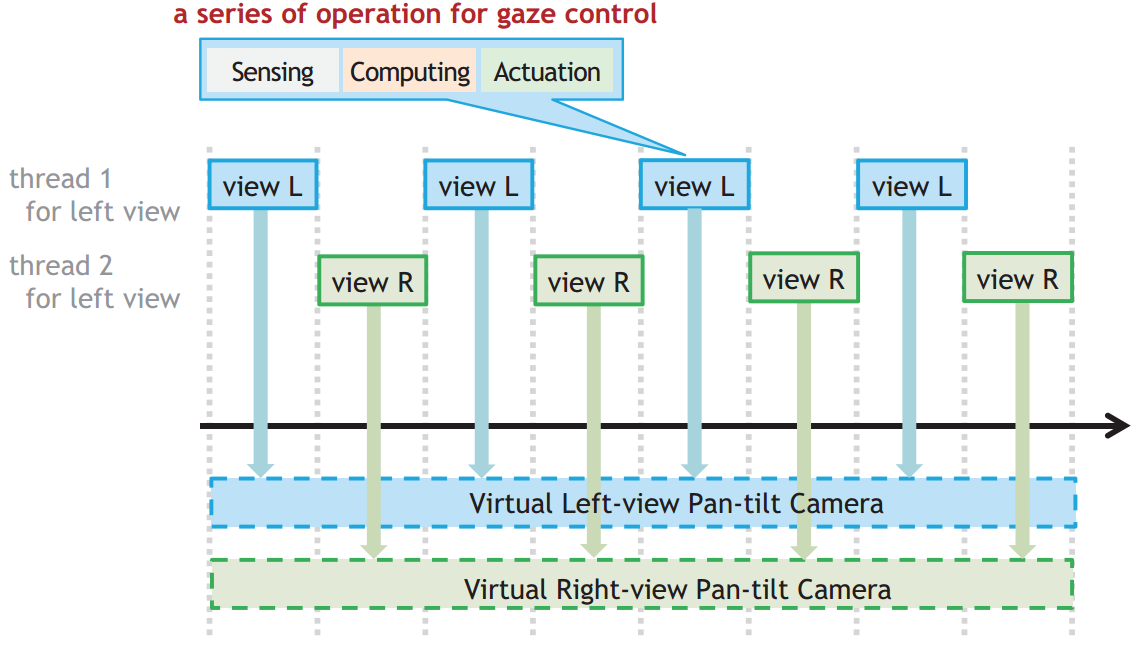 |
Time-division thread processes
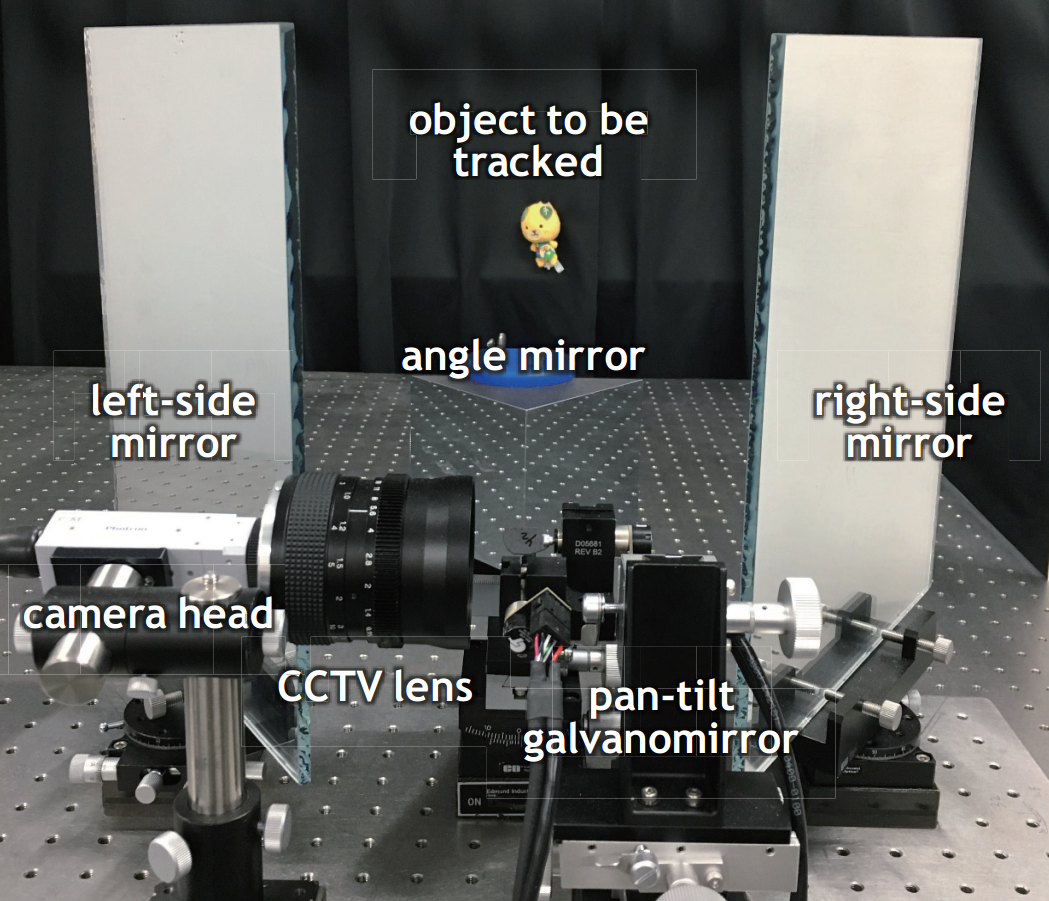 |
System configuration
 |
3-D measurement
 |
WMV movie(3.65M) 3-D Measurement demo |