RESEARCHES
Smart Vision & Robotic Sensing

Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Monocular Stereo Measurement Using High-Speed Catadioptric Tracking
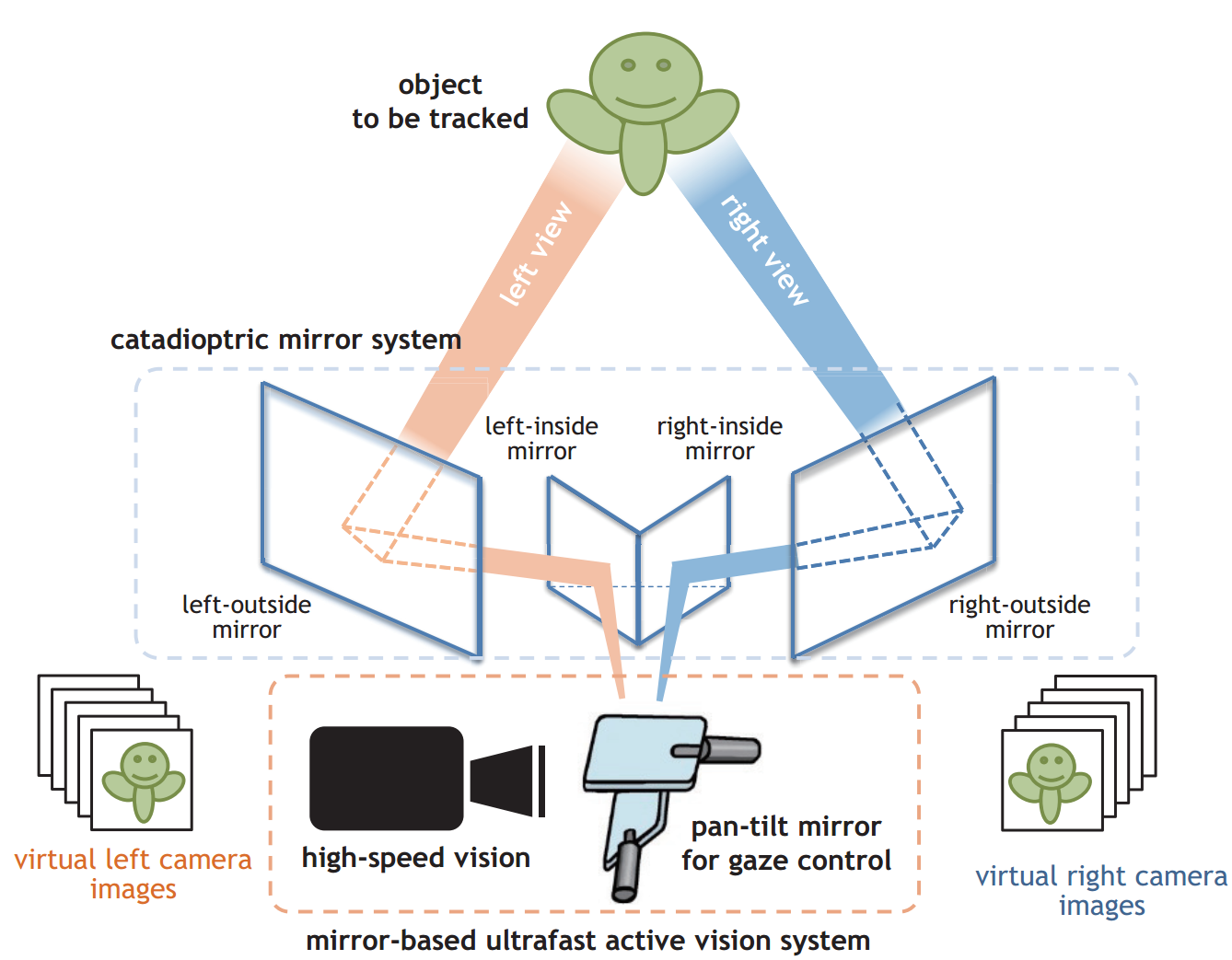
In this study, we present a novel concept of real-time catadioptric stereo tracking using a single ultrafast mirror-drive pan-tilt active vision system that can simultaneously switch between hundreds of different views in a second. By accelerating video-shooting, computation, and actuation at the millisecond-granularity level for time division multithreaded processing in ultrafast gaze control, the active vision system can function virtually as two or more tracking cameras with different views. It enables a single active vision system to act as virtual left and right pan-tilt cameras that can simultaneously shoot a pair of stereo images for the same object to be observed at arbitrary viewpoints by switching the direction of the mirrors of the active vision system frame by frame.
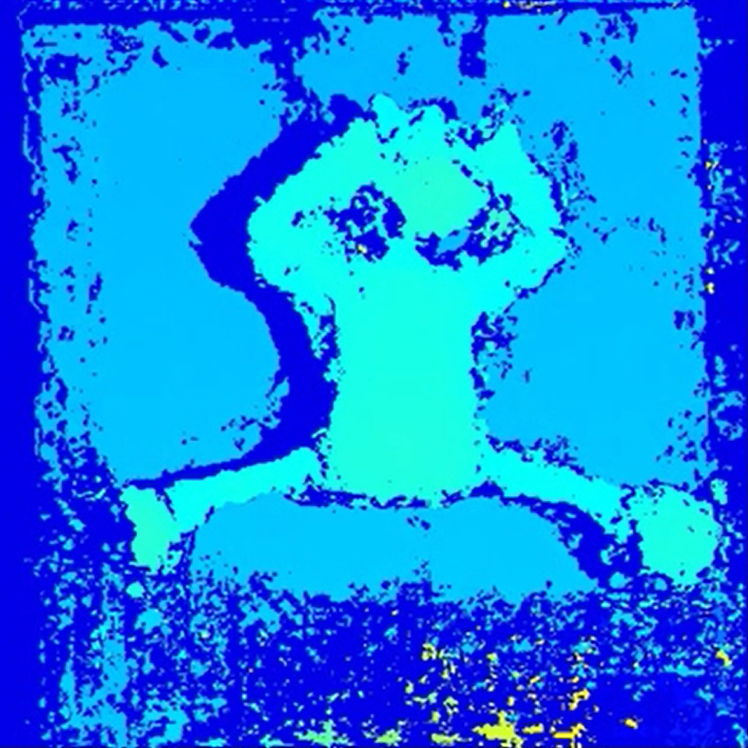
We developed a monocular galvano-mirror-based stereo tracking system that can switch between 500 different views in a second, and it functions as a catadioptric active stereo with left and right pan-tilt tracking cameras that can virtually capture 8-bit color 512×512 images each operating at 250 fps to mechanically track a fast-moving object with a sufficient parallax for accurate 3D measurement. Several tracking experiments for moving objects in 3D space are described to demonstrate the performance of our monocular stereo tracking system.
 |
Concept
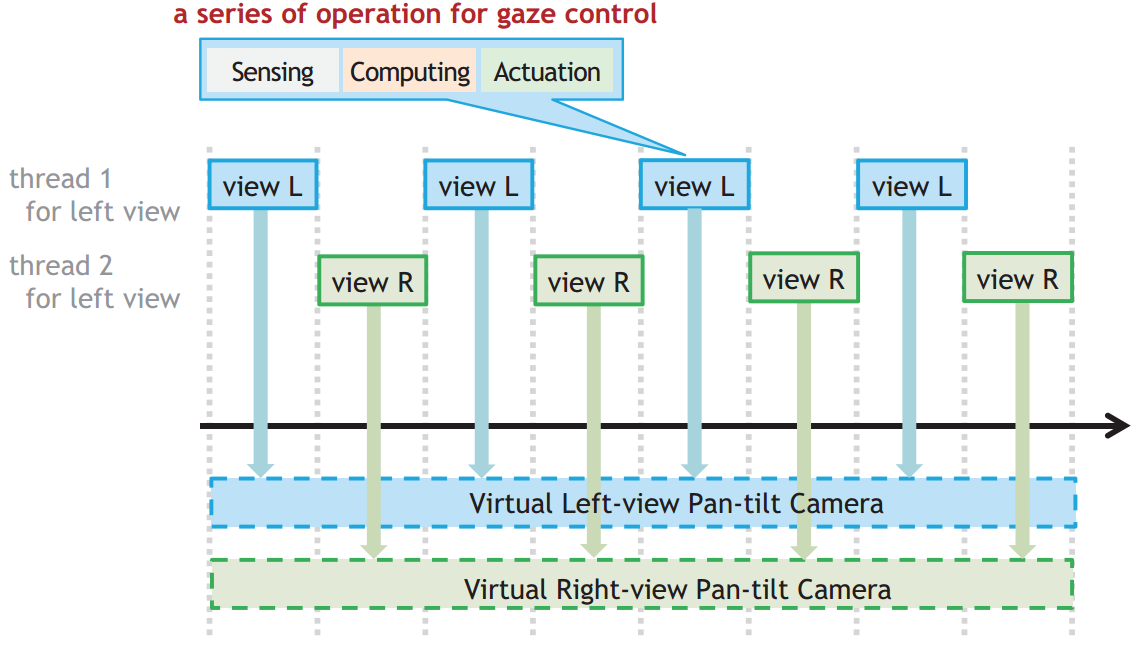 |
Time-division thread processes
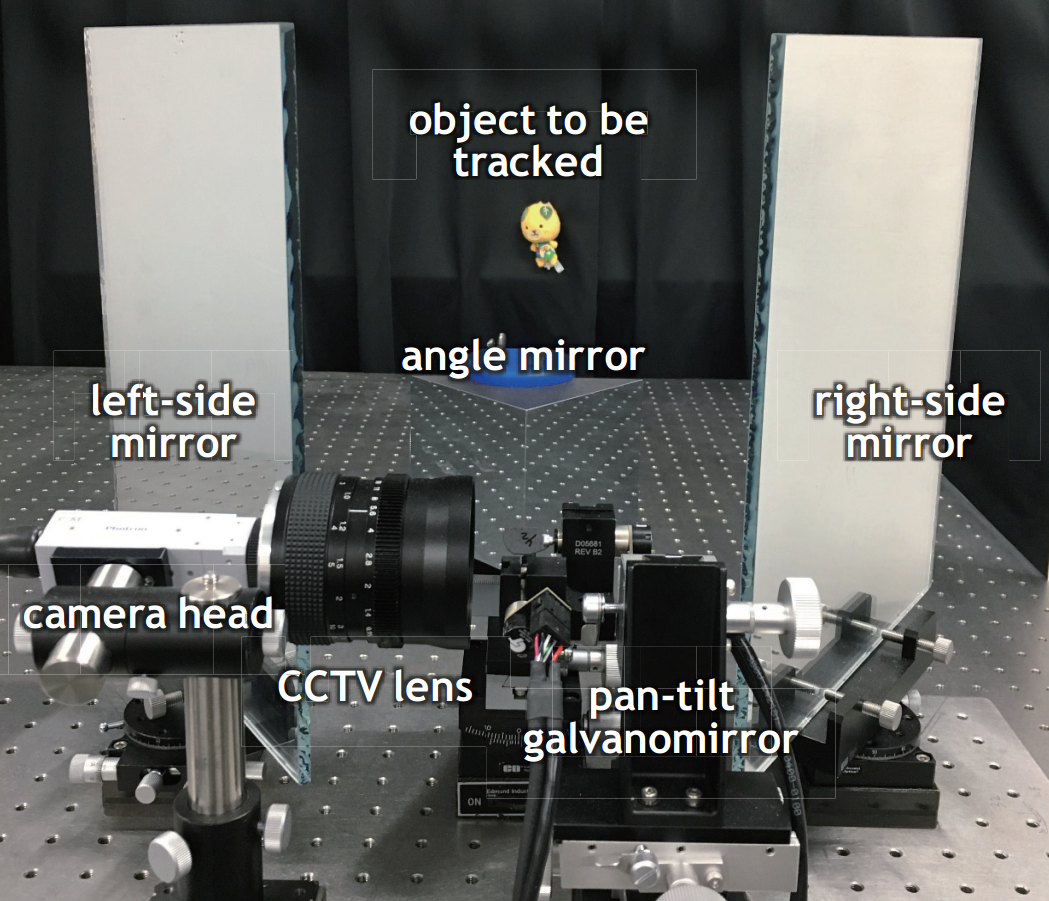 |
System configuration
 |
3-D measurement
 |
WMV movie(3.65M) 3-D Measurement demo |