RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Motion-blur-free Microscope
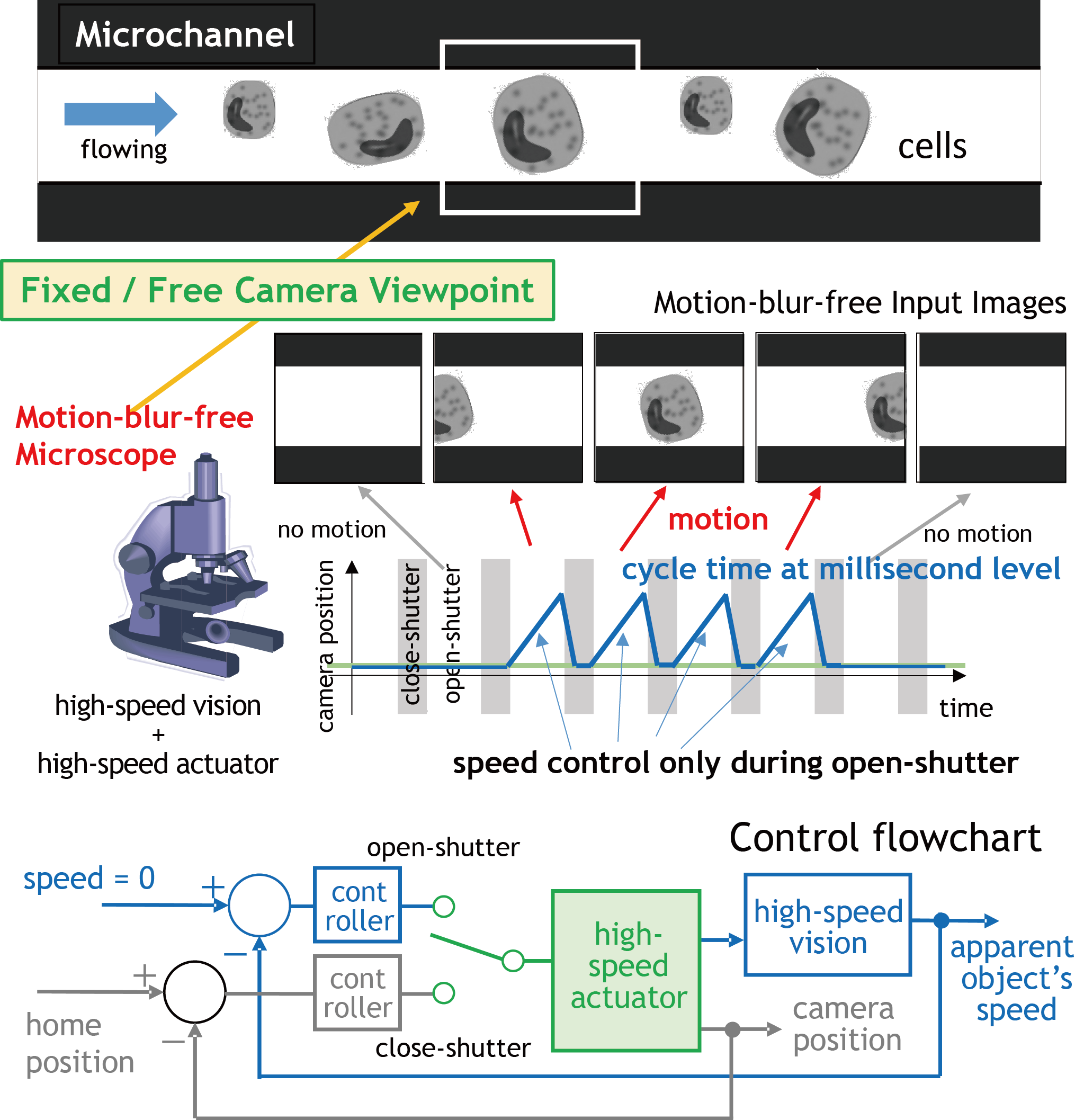
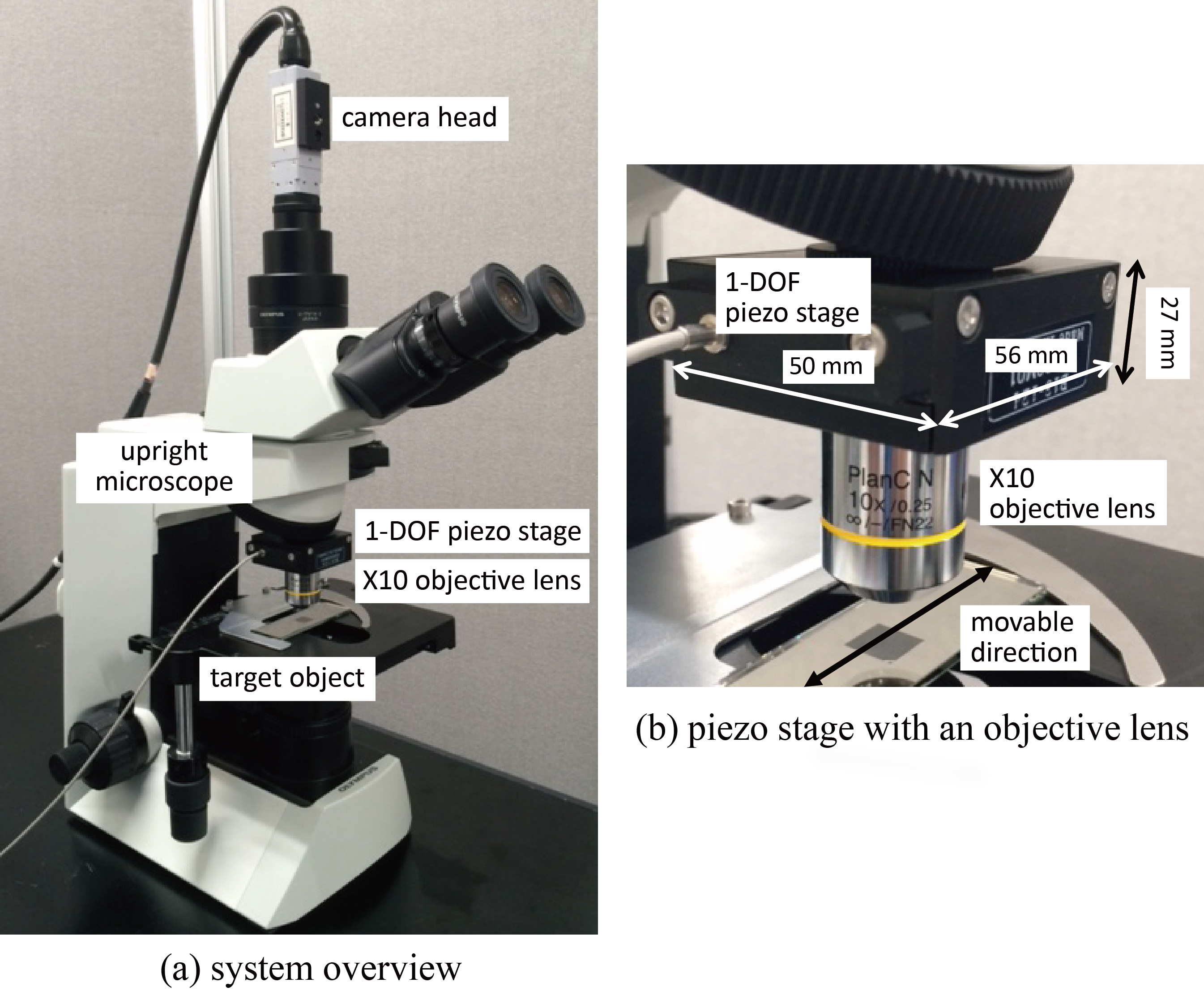
We develop a motion-blur-free microscope for shooting non-blurred videos of moving objects by implementing a frame-by-frame intermittent tracking method with a microscopic high-speed tracking system that controls the position of the objective lens using high-frame-rate video processing.
With our tracking method, the control target alternates at several hundred hertz, according to the camera’s shutter state.
The apparent speed of the target object in the captured images is maintained at zero to suppress motion blur when the shutter is open, and the camera’s position returns to its home position when the shutter is closed.
Our motion-blur-free microscope can shoot non-blurred 512×512 images at 125 fps with frame-by frame intermittent tracking for objects moving unidirectionally.
Compared with the degradation in video that was recorded without tracking, our method reduces image degradation from motion blur 1/40 times or less without decreasing the exposure time when a 10× objective lens is attached.
Its performance is verified by showing the experimental results from several moving scenes in microscopic view.
 |
MP4 movie(2.7M) Motion-blur-free Microscope |