RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
HFR-Video Analysis of Laboratory Rats Behaviors in FST
The forced swim test (FST) is a method for measuring the pharmacological effects of antidepressants or changes in stress-evoked behavior in laboratory animals such as rats and mice. However, traditional measurement methods using low frame rate video have not always been accurate and objective because laboratory animals frequently make quick movements during the FST, especially in swimming and climbing. In this study, a novel laboratory animal behavior quantification system is developed for the FST by introducing a high-speed vision system that can record images at a frame rate of 240 fps for a long time.
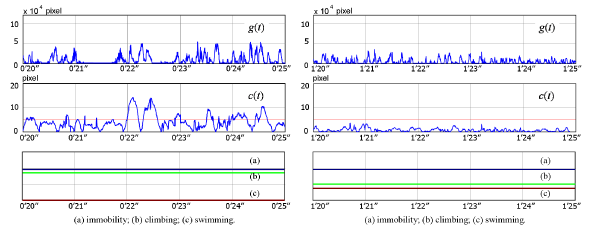
We consider the paw movement and body’s vertical movement for the discrimination of the main three behaviors, which are immobility, climbing, and swimming. In particular, in climbing the animal moves its own body up and down vigorously, while its body movement in the vertical direction is slight during swimming. We evaluated the effectiveness of the developed system by obtaining experimental results for a nine-minute FST using three WISTAR rats. The following graphs are examples of the behavior features in 5 second with regard to climbing and swimming. (g(t): paw movement feature, c(t): vertical movement feature).
We consider the paw movement and body’s vertical movement for the discrimination of the main three behaviors, which are immobility, climbing, and swimming. In particular, in climbing the animal moves its own body up and down vigorously, while its body movement in the vertical direction is slight during swimming. We evaluated the effectiveness of the developed system by obtaining experimental results for a nine-minute FST using three WISTAR rats. The following graphs are examples of the behavior features in 5 second with regard to climbing and swimming. (g(t): paw movement feature, c(t): vertical movement feature).
 |
MPG movie (296KB) swimming |
 |
MPG movie (296KB) climbing |