RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Simultaneous Projection Mapping Using High-frame-rate Depth Vision
In this paper, we report on the development of a projection mapping system that can project RGB light patterns that are enhanced for three-dimensional (3-D) scenes using a GPU-based high-frame-rate (HFR) vision system synchronized with HFR projectors.
Our system can acquire 512×512 depth images in real time at 500 fps. The depth image processing is accelerated by installing a GPU board for parallel processing of a gray-code structured light method using infrared (IR) light patterns projected from an IR projector. Using the computed depth images, suitable RGB light patterns to be projected are generated in real time for enhanced application tasks. They are projected from an RGB projector as augmented information onto a 3-D scene with pixel-wise correspondence even when the 3-D scene is time-varied.
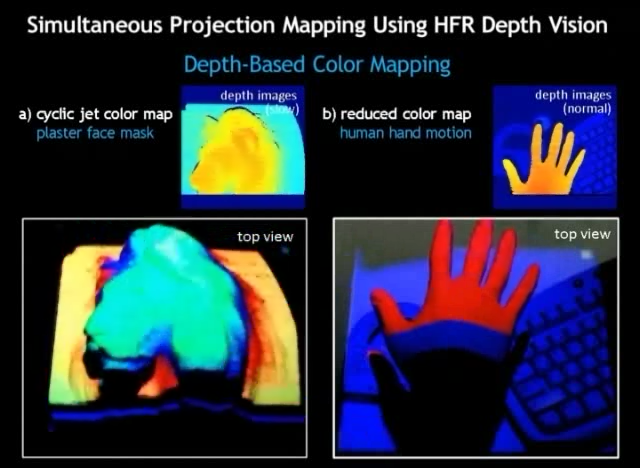
Experimental results obtained from enhanced application tasks for time-varying 3-D scenes such as (1) depth-based color mapping and (2) augmented reality (AR) spirit level, confirm the efficacy of our system.
Our system can acquire 512×512 depth images in real time at 500 fps. The depth image processing is accelerated by installing a GPU board for parallel processing of a gray-code structured light method using infrared (IR) light patterns projected from an IR projector. Using the computed depth images, suitable RGB light patterns to be projected are generated in real time for enhanced application tasks. They are projected from an RGB projector as augmented information onto a 3-D scene with pixel-wise correspondence even when the 3-D scene is time-varied.
Experimental results obtained from enhanced application tasks for time-varying 3-D scenes such as (1) depth-based color mapping and (2) augmented reality (AR) spirit level, confirm the efficacy of our system.
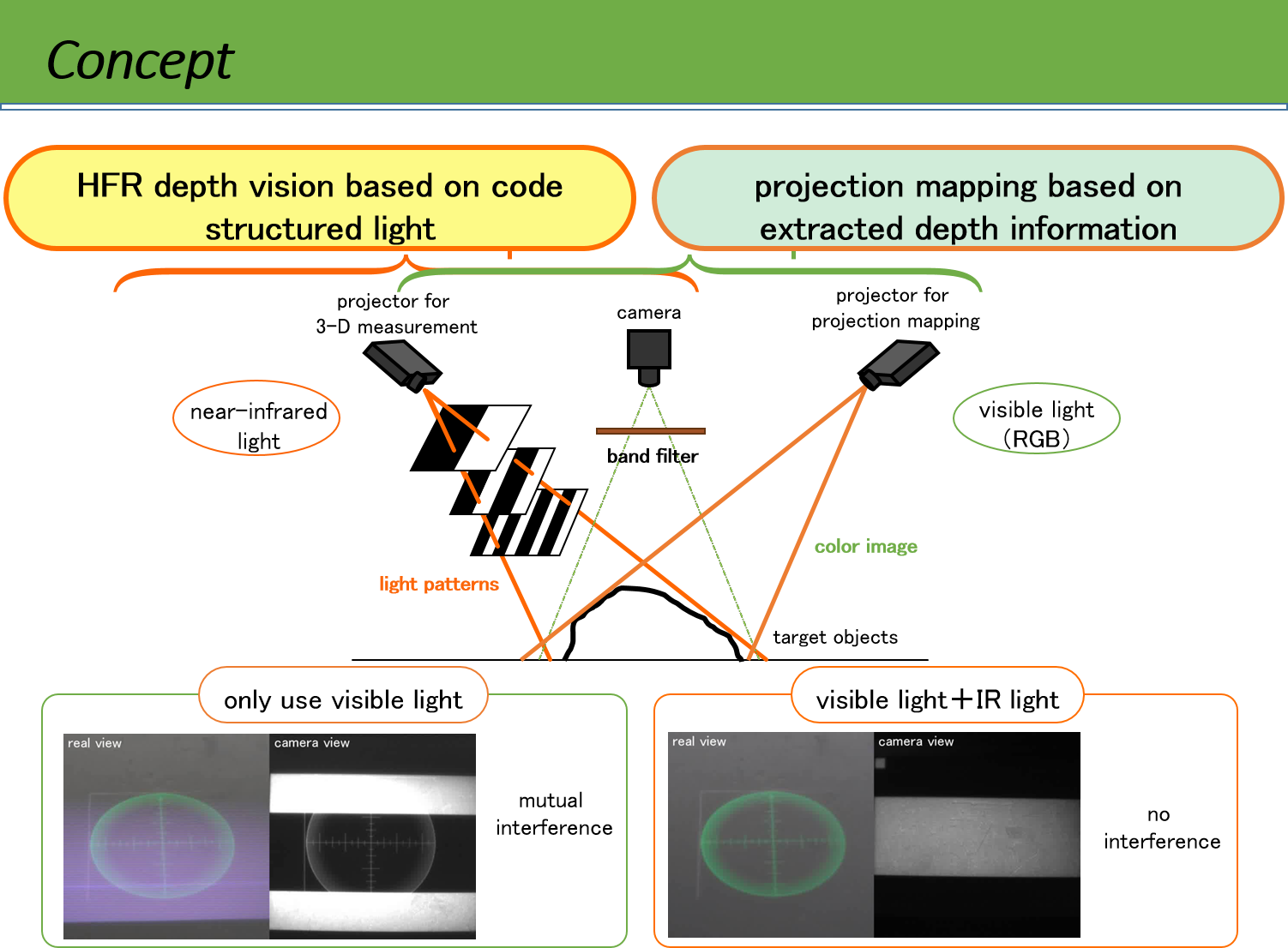 |
Fig. 1: Concept of our system. |
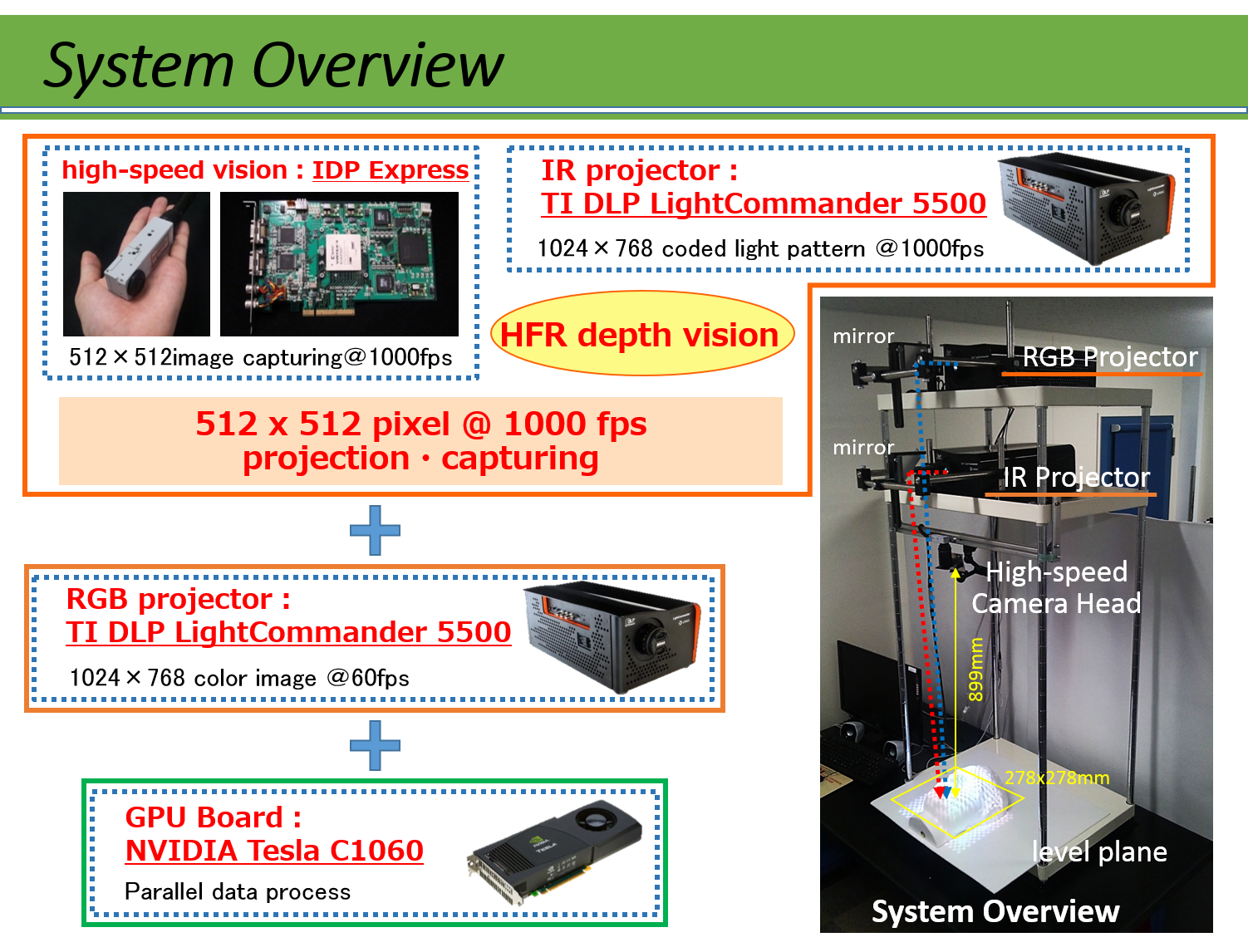 |
Fig. 2: System overview. |
 |
| WMV movie (1.33M) Demo video for simultaneous projection mapping using HFR depth vision |
Reference
- Jun Chen, Takashi Yamamoto, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii, Real-time Projection Mapping Using High-frame-rate Structured Light 3-D Vision, SICE Journal of Control, Measurement, and System Integration, Vol.8, No.4, pp.265-272 (2015)
- Jun Chen, Takashi Yamamoto, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Simultaneous Projection Mapping Using High-frame-rate Depth Vision, Proc. IEEE Int. Conf. on Robotics and Automation, pp.4506-4511, 2014.