RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-time Finger Tapping Interface
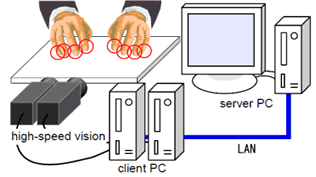 In this study, we propose a finger-tapping interface called FINGERTAP, which can estimate the contact states and forces on human fingertips in real time using only the fingertip positions measured by high-speed vision cameras. In particular, we focus on the high-frequency component that develops at the moment when a fingertip contacts something. We introduce a real-time estimation algorithm for the fingertip contact state and force using frequency filtering to detect the high-frequency movement component of the fingertip positions.
In this study, we propose a finger-tapping interface called FINGERTAP, which can estimate the contact states and forces on human fingertips in real time using only the fingertip positions measured by high-speed vision cameras. In particular, we focus on the high-frequency component that develops at the moment when a fingertip contacts something. We introduce a real-time estimation algorithm for the fingertip contact state and force using frequency filtering to detect the high-frequency movement component of the fingertip positions. We also introduce a clickable pointing interface and a virtual musical instrument as demonstration application examples using the FINGERTAP system, and we show the effectiveness of nonmountable type finger-tapping interfaces, which can estimate the fingertip positions and their contact forces simultaneously.
 |
MPEG movie(2.3M) tapping counter |
 |
MPEG movie(2.9M) virtual instrument |
 |
MPEG movie(5.0M) PC Interface |