RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
3D Motion Capture using Rigid Body Models
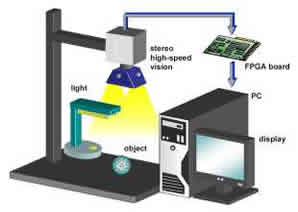
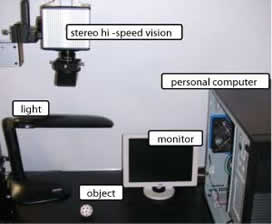
In this study, we developed a 3D measurement system for capturing the movement of an object with numerous markers by mounting a space conversion optical system on a high-speed vision platform, H3 Vision system. This system measures the 3D translation and rotation of an object with hundreds of markers in real time. Here we introduced several rigid body models for stable 3D motion trackingeven when several markers are occluded. Actually we conducted real-time 3D motion measurement experiments at 1000fps for several quickly moving and rotating objects. and showed the validity of our system. It proves the effectiveness of the high-speed vision for multipoint 3D motion capturing at high speed in real time.
 |
 |
 |
MP4 movie(1.3M) 3D motion capture for quickly rotating table tennis ball(drive ball/cut ball) |
 |
MP4 movie(1.8M) 3D motion capture for arbitrary shaped objects (cube/mouse) |