RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
3D Shape Measurement Using a Multi-Sided Mirror
In this study, we proposed a new idea for high-speed and high-resolution 3D shape measurement based on light-section method by setting a multi-sided mirror between an image sensor and a measured object, and developed a prototype system for 3D shape measurement based on a high speed vision hardware, which can process a 1024×1024 pixels image at 1000fps.
The light-section method, that is a well-known active 3D shape measurement method, is not so efficient for high-speed 3D shape measurement, because it can only obtain an intersected 3D profile from a 2D image. Assuming planar objects to be measured, spatial transforms of the image area of the image sensor by using a multi-sided mirror in our method, enable a wider measurement range in a direction than the spatial resolution of an image sensor based on the light-section method.
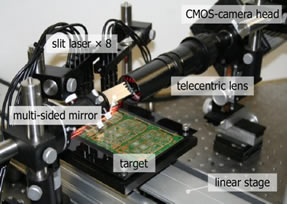 Based on the proposed method, we developed a high-speed 3D shape measurement system using a eight-sided mirror and a high-speed vision platform H3 Vision that can process 1024×1024 images at 1000 fps in real time.
On the H3 Vision, hardware circuit logic of light-section method was implemented for 8 divided image areas of 1024×128 pixels on an FPGA, and a 3D profile of 8192 points can be simultaneously outputted at 1000 fps.
Based on the proposed method, we developed a high-speed 3D shape measurement system using a eight-sided mirror and a high-speed vision platform H3 Vision that can process 1024×1024 images at 1000 fps in real time.
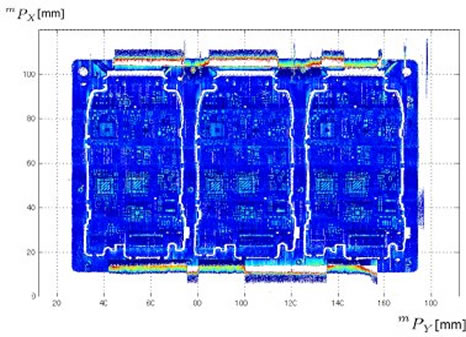
On the H3 Vision, hardware circuit logic of light-section method was implemented for 8 divided image areas of 1024×128 pixels on an FPGA, and a 3D profile of 8192 points can be simultaneously outputted at 1000 fps. Wedemonstrated the effectiveness of the 3D shape measurement system by showing the measurement results for the 3D shapes of solders on a printed circuit board.
 |
mouse shape MPG(2.0M) |
 |
printed circuit board MPG(1.1M) |