RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Fast 3-D Shape Measurement Using Blink-Dot Projection
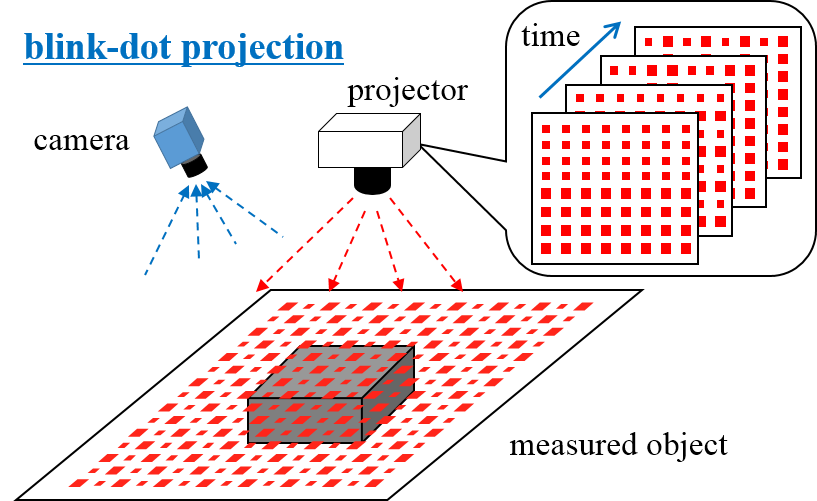
In this study, we propose a novel dot-pattern-projection three-dimensional (3-D) shape measurement method that can measure 3-D displacements of blink dots projected onto a measured object accurately even when it moves rapidly or is observed from a camera as moving rapidly.
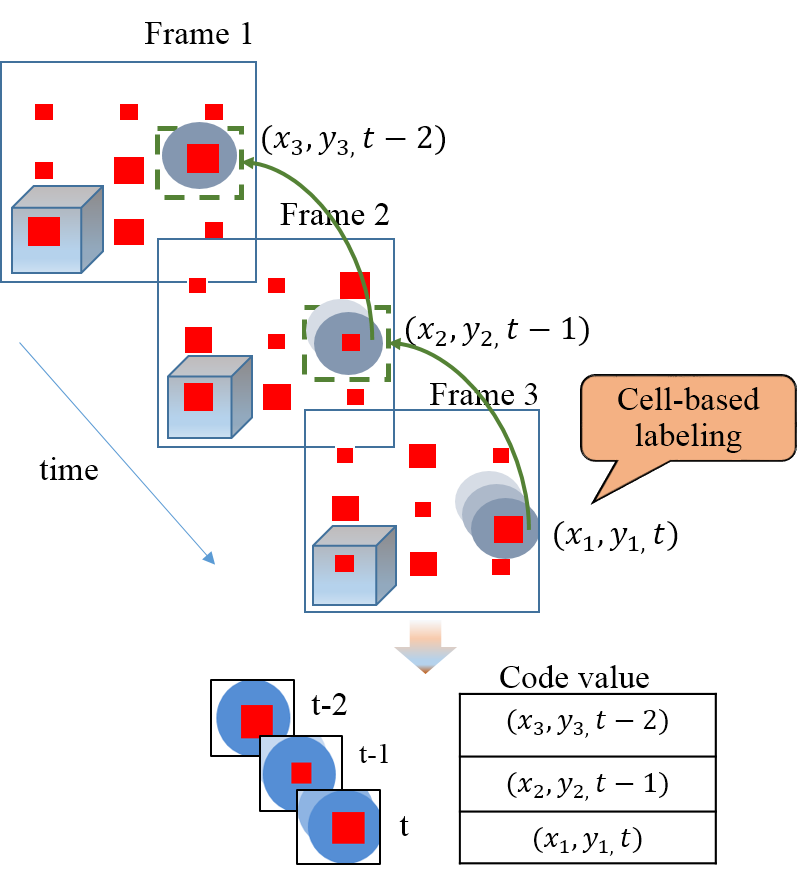
In our method, blinking dot patterns, in which each dot changes its size at different timings corresponding to its identification (ID) number, are projected from a projector at a high frame rate. 3-D shapes can be obtained without any miscorrespondence of the projected dots between frames by simultaneous tracking and identification of multiple dots projected onto a measured 3-D object in a camera view. Our method is implemented on a field-programmable gate array (FPGA)-based high-frame-rate (HFR) vision platform that can track and recognize as much as 15×15 blink-dot pattern in a 512×512 image in real time at 1000 fps, synchronized with an HFR projector.
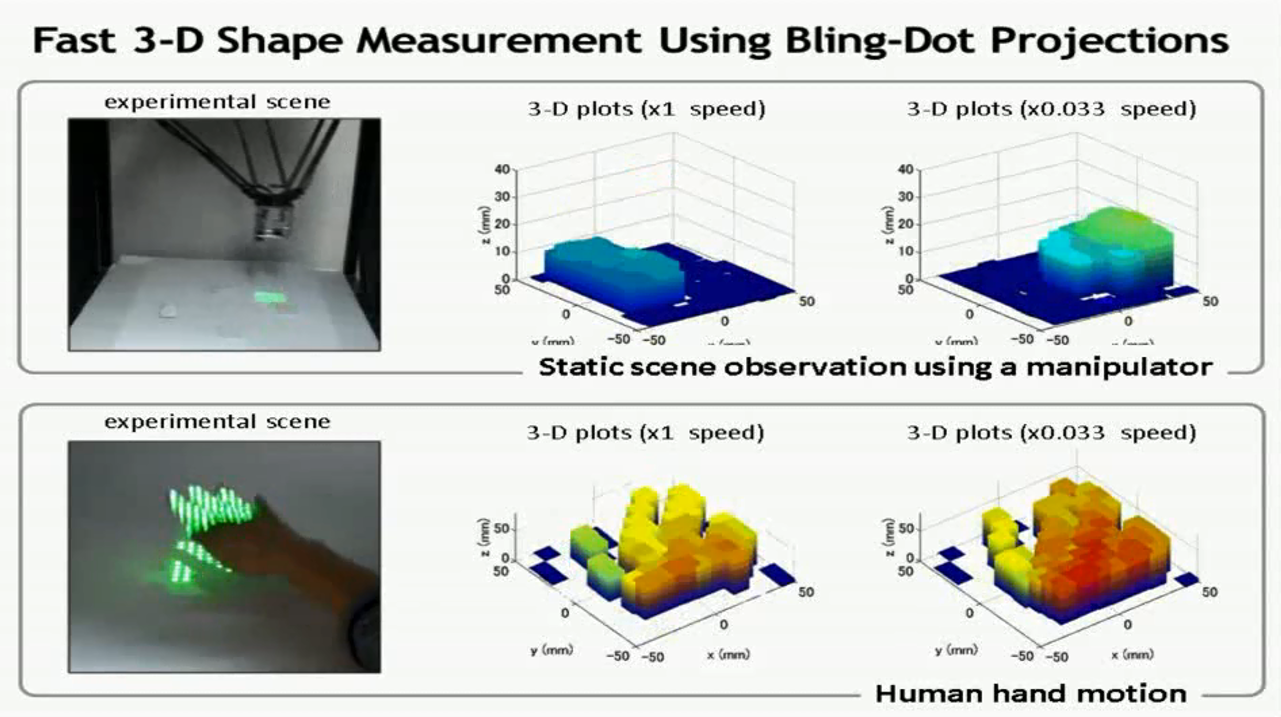
We demonstrate the performance of our system by showing real-time 3-D measurement results when our system is mounted on a parallel link manipulator as a sensing head.
In our method, blinking dot patterns, in which each dot changes its size at different timings corresponding to its identification (ID) number, are projected from a projector at a high frame rate. 3-D shapes can be obtained without any miscorrespondence of the projected dots between frames by simultaneous tracking and identification of multiple dots projected onto a measured 3-D object in a camera view. Our method is implemented on a field-programmable gate array (FPGA)-based high-frame-rate (HFR) vision platform that can track and recognize as much as 15×15 blink-dot pattern in a 512×512 image in real time at 1000 fps, synchronized with an HFR projector.
We demonstrate the performance of our system by showing real-time 3-D measurement results when our system is mounted on a parallel link manipulator as a sensing head.
 |
 |
 |
MPEG movie(4.7M) 3-D measurement |
Reference
- Jun Chen, Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii, Blink-Spot Projection Method for Fast Three-Dimensional Shape Measurement, Journal of Robotics and Mechatronics, Vol.27, No.4, pp.430-443 (2015)
- Jun Chen, Qingyi Gu, Hao Gao, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii, Fast 3-D Shape Measurement Using Blink-Dot Projection, Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2683-2688, 2013.