RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
Non-contact manipulation using air-jet stream
Traditional manipulation has a contact to an object, and many manipulators are used at the industry, robot hand, and so on.
On the other hand, some manipulator that is not contact to an object, but using electromagnetic force and sonic wave is also reported.
If the manipulator and a object are not contacted, it is possible to manipulate more and more objects by robot hand.
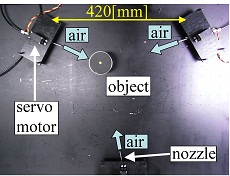
In this research, we focus an air manipulation that can make big force and can use easily and relatively, and propose a method to move an object to target point using air-jet stream.
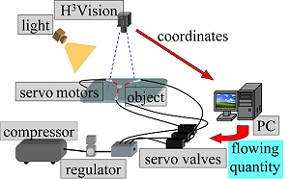
Experimental system is shown in below figure. The coordinate of the object are measured using high speed vision and the amounts of air-jet stream are calculated by the PC in real-time.
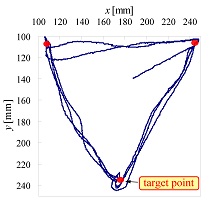
The below movie and graphs are the experimental result. In the graph, the blue line shows trajectory of the object and the red points are target points. The results show that the object passes the target point, so it is possible to manipulate an object by constructed air manipulator.
Experimental system is shown in below figure. The coordinate of the object are measured using high speed vision and the amounts of air-jet stream are calculated by the PC in real-time.
The below movie and graphs are the experimental result. In the graph, the blue line shows trajectory of the object and the red points are target points. The results show that the object passes the target point, so it is possible to manipulate an object by constructed air manipulator.
 |
 |
|
WMV movie (1.1 M) |
 |