RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
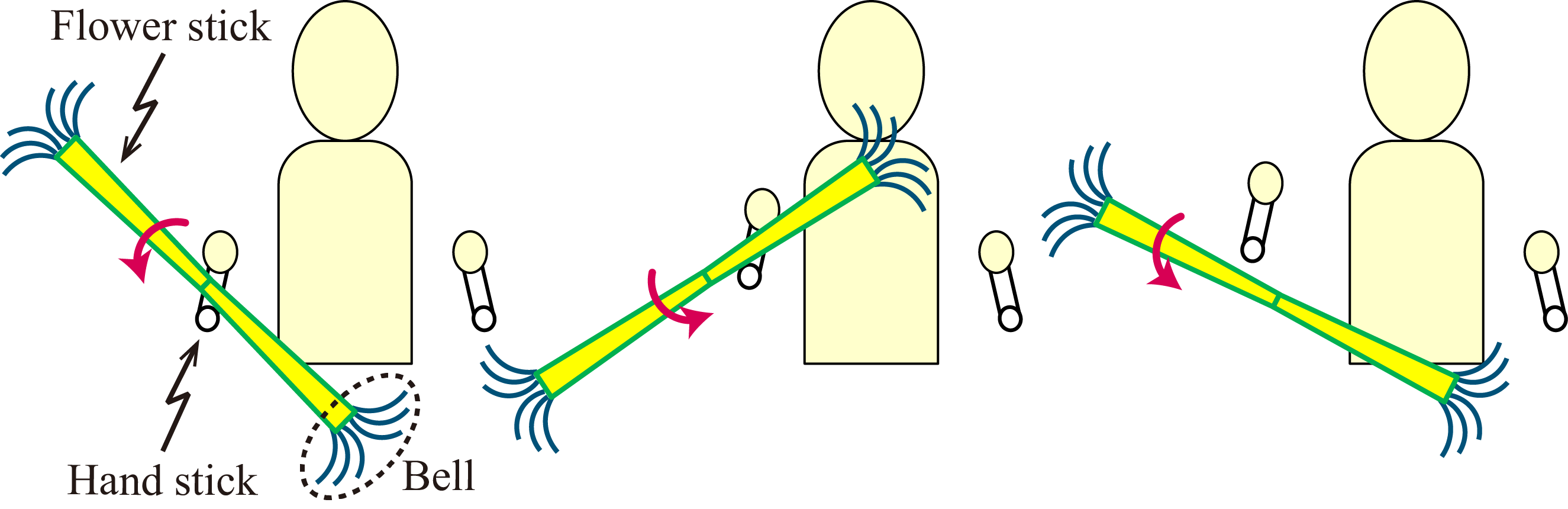
Robotic Juggling of Flower Stick
Flower stick juggling is a dexterous task done by skillful jugglers. We aim to realize dexterous tasks done by humans using robotic systems. This work focuses on flower stick juggling and proposes a feedback control strategy for a flower stick juggling task called “propeller” as one of the robotic dexterous manipulations.
The propeller motion is modeled by considering combined flower stick and a robotic manipulator.
We developed a control strategy that allows stable cyclic rotation of the flower stick in the air.
The control parameters in the control strategy are searched through numerical simulation.
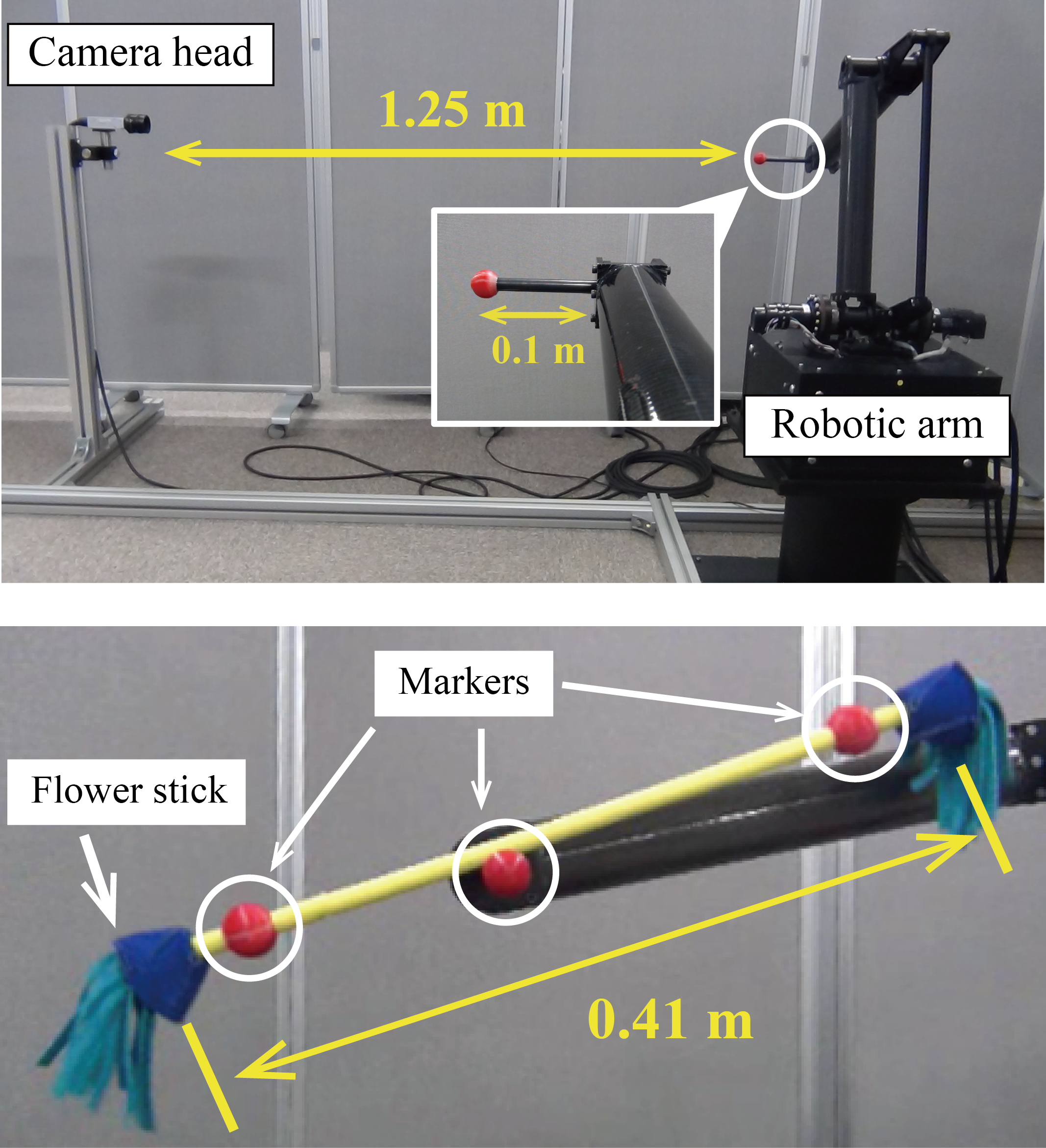
Finally, the flower stick propeller motion is realized using an actual robotic system.
 |
 |
 |
MP4 movie(8.7M) Flower stick juggling |
Reference
- Tadayoshi Aoyama, Takeshi Takaki, Qingyi Gu, and Idaku Ishii: Control Scheme of Nongrasping Manipulation Based on Virtual Connecting Constraint, Proc. IEEE International Conference on Robotics and Automation, pp.3819-3824, 2016.
- Tadayoshi Aoyama, Takeshi Takaki, Takumi Miura, Qingyi Gu, and Idaku Ishii: Realization of Flower Stick Rotation Using Robotic Arm, Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp.5648-5653, 2015.