RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
Monocular Stereo Measurement Using Viewpoint Switching Iris
In this study, we propose a new monocular stereo measurement method by which the aperture position can be changed easily.
In our monocular stereo camera system, the viewpoint depends on the iris position and the aperture position is switched actively by changing the iris position.
The mechanism of the viewpoint switching iris is shown in the below figure. It consists of an aperture and a rotating slit. The iris has two pinholes, and they are switched alternatively when the slit rotates. The rotating slit is rotated and synchronized by connecting it to a motor by a belt. The rotating speed is controlled so that the switching of right and left viewpoints takes place between two frames. The distance of iris holes is set to 13.7mm. The diameter of these holes is both 1.5mm.
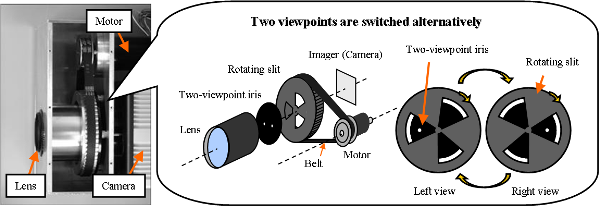
In the experiment, a high-speed camera FASTCAM- 1024PCI manufactured by Photron was used. The resolution is set to 1024×1024 pixels, and the frame rate was set to 1000 fps. The switching rate of viewpoint switching iris was set to 200Hz, and we can obtain depth measurement using stereo images at 100fps. The time synchronization error between the stereo images was 1ms.
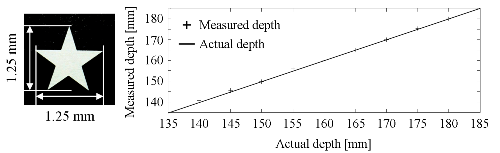
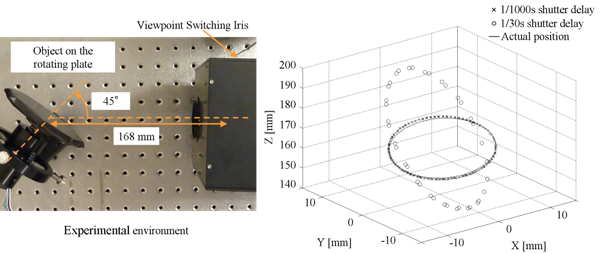
We verified that the monocular stereo camera along with the viewpoint switching iris can be used to obtain 3D images of high-speed moving objects from different viewpoints by switching the iris position.
The mechanism of the viewpoint switching iris is shown in the below figure. It consists of an aperture and a rotating slit. The iris has two pinholes, and they are switched alternatively when the slit rotates. The rotating slit is rotated and synchronized by connecting it to a motor by a belt. The rotating speed is controlled so that the switching of right and left viewpoints takes place between two frames. The distance of iris holes is set to 13.7mm. The diameter of these holes is both 1.5mm.
In the experiment, a high-speed camera FASTCAM- 1024PCI manufactured by Photron was used. The resolution is set to 1024×1024 pixels, and the frame rate was set to 1000 fps. The switching rate of viewpoint switching iris was set to 200Hz, and we can obtain depth measurement using stereo images at 100fps. The time synchronization error between the stereo images was 1ms.
We verified that the monocular stereo camera along with the viewpoint switching iris can be used to obtain 3D images of high-speed moving objects from different viewpoints by switching the iris position.
 |
MPEG movie(4.7M) viewpoint switching iris |