RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
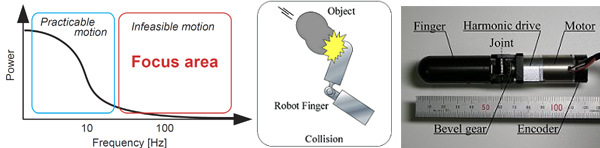
Collision Detection Method using Frequency Information
Motions of a robot finger are limited at low frequency when motors of the finger is driven practically.
Then a signal of a joint sensor does not include high frequency.
The high frequency can be used as profitable information.
We focus on the high frequency caused by a collision and propose a collision detection method.
We analyze the power spectrum of a joint angle and achieve the collision detection in the experiment.

|
MPEG movie (5.9 M) Collision Detection (1 Hz) |

|
MPEG movie (2.6 M) Collision Detection (20 Hz) |