RESEARCHES
Smart Mechanics Design & Manipulation

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Takeshi TAKAKI
- >> Research Contents
- As basic robotic technologies for rapid and flexible responses in the real world, we are studying sensor-based manipulation combined with high-speed vision and also robot mechanisms that have built-in intelligence in order to realize manipulation that differs from that of humans.
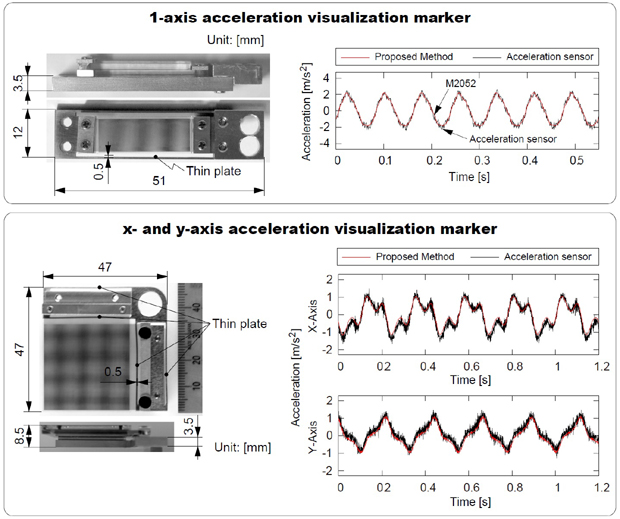
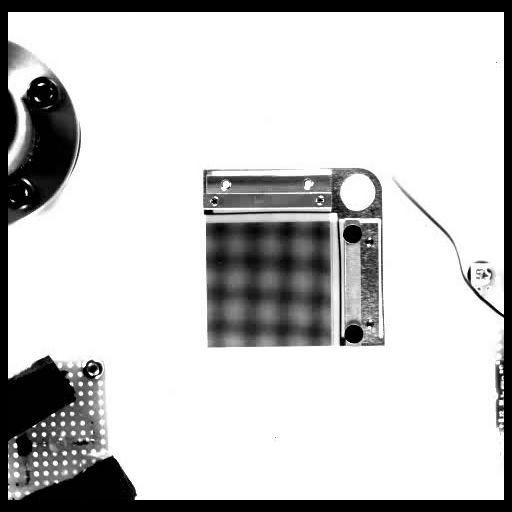
Acceleration Visualization Marker Using Moire Fringe
The evaluation of the effects of acceleration on large structures such as industrial plants, bridge, and buildings is required to maintain the safety of such structures.
To meet this requirement, we propose an acceleration visualization marker that can display fringes that correspond to the magnitude of acceleration without the use of electronic elements such as amplifiers, strain gauges and wires.
When an elastic object accelerates, an inertial force acts on it, and the object deforms owing to its elasticity.
To measure acceleration, most acceleration sensors measure a small displacement produced by the deformation.
Our method focuses on the measurement of this small displacement.
The proposed marker visually magnifies and displays the displacement using a moire fringe.
Its structure is simple, and it consists of elastic plates and two glass plates printed with line gratings.
An accurate value of the acceleration can be obtained from an image of the marker by using image processing.
 |

|
MPG movie (5.2 M) 1-axis acceleration visualization marker |
|
MPG movie (8.5 M) x- and y-axis acceleration visualization marker |