RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Active Vibration Control using High-Speed Vision
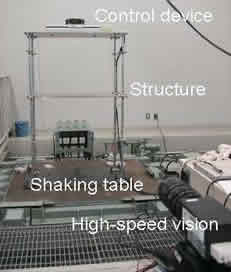 Recently, vibration control technologies have improved due to technological advancements in computers, sensors, and actuators. Concerning civil engineering structures, the advantage of passive control is larger than active control in the aspect of maintenance and reliability. However, bigger effects of structural response control can be expected regarding active control, and the adoption for important civil engineering structures can be expected in the near future. In this study, we investigate active control using hyper vision technology, and the feasibility of the active control method is confirmed by numerical simulations and by shaking table tests.
Recently, vibration control technologies have improved due to technological advancements in computers, sensors, and actuators. Concerning civil engineering structures, the advantage of passive control is larger than active control in the aspect of maintenance and reliability. However, bigger effects of structural response control can be expected regarding active control, and the adoption for important civil engineering structures can be expected in the near future. In this study, we investigate active control using hyper vision technology, and the feasibility of the active control method is confirmed by numerical simulations and by shaking table tests.
 |
MPEG movie(4.6M) with active control |
|
MPEG movie(2.9M) without active control |