RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Dynamics-Based Visual Inspection Using Modal Parameter Estimation
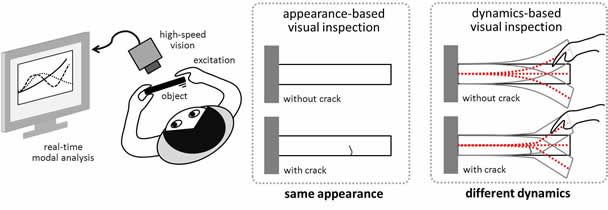
In this study, we propose the concept of dynamics-based visual inspection for the verification of structural dynamic properties of a vibrating object; the inspection method involves the analysis of the vibration distribution of the object by using a high-frame-rate video.
In dynamics-based visual inspection, the dynamic properties represented by modal parameters are simultaneously estimated from the HFR video, and they can be used as input-invariant image features for robust structure recognition. These features are clearly different from appearance-based image features obtained from a single-frame image. Even when the static appearances of the structure with and without the crack are similar, a small defect can be detected by examining the difference in the dynamic properties of the structure between the presence and absence of the crack.
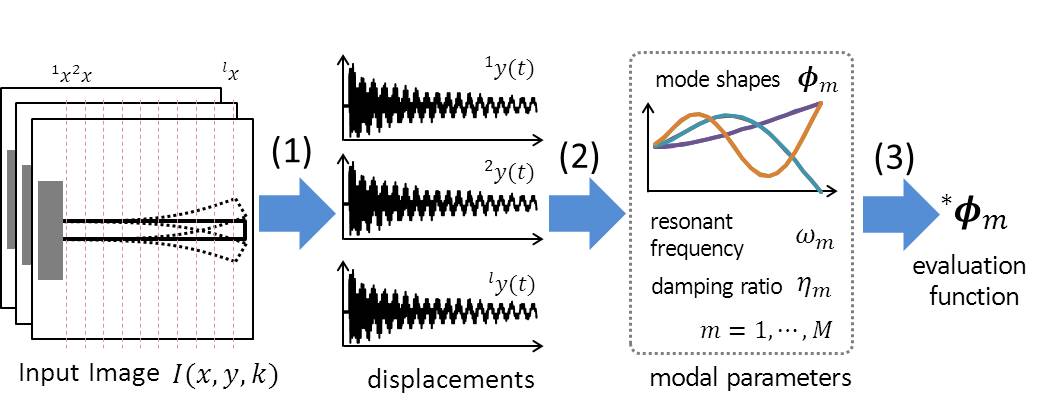
Modal parameters of an excited object are simultaneously estimated to determine its input-invariant dynamic properties by using a fast output-only modal analysis algorithm, SSI-CPAST. The algorithm was implemented on a 2000-fps vision platform, and it facilitates non-destructive monitoring of the structure of beam-shaped objects vibrating at dozens of hertz; the algorithm detects small changes in the dynamic properties of the objects caused by internal defects such as fatigue cracks.
The modal parameters resonant frequency and mode shape were actually estimated for beam-shaped objects with artificial cracks excited by human finger tapping to verify the performance of 2000-fps real-time dynamics-based visual inspection.
In dynamics-based visual inspection, the dynamic properties represented by modal parameters are simultaneously estimated from the HFR video, and they can be used as input-invariant image features for robust structure recognition. These features are clearly different from appearance-based image features obtained from a single-frame image. Even when the static appearances of the structure with and without the crack are similar, a small defect can be detected by examining the difference in the dynamic properties of the structure between the presence and absence of the crack.
Modal parameters of an excited object are simultaneously estimated to determine its input-invariant dynamic properties by using a fast output-only modal analysis algorithm, SSI-CPAST. The algorithm was implemented on a 2000-fps vision platform, and it facilitates non-destructive monitoring of the structure of beam-shaped objects vibrating at dozens of hertz; the algorithm detects small changes in the dynamic properties of the objects caused by internal defects such as fatigue cracks.
The modal parameters resonant frequency and mode shape were actually estimated for beam-shaped objects with artificial cracks excited by human finger tapping to verify the performance of 2000-fps real-time dynamics-based visual inspection.
 |
MPG movie(2.6M) Overview 1 |
 |
MPG movie(2.8M)
Overview 2 |
Reference
- Hua Yang, Idaku Ishii, and Takeshi Takaki : Real-Time Vision-Based Modal Parameters Estimation at 10000 fps, Proc. SPIE 8345 (SPIE Smart Structures / Sensors and Smart Structure Technologies for Civil, Mechanical, and Aerospace Systems), 83454F, 2012.
- Hua Yang, Takeshi Takaki, and Idaku Ishii : A Structural Damage Quantification Method for HFR-Video-Based Modal Testing, Journal of System Design and Dynamics, Vol.5, No.4, pp.624-641 (2011)
- Hua Yang, Takeshi Takaki, and Idaku Ishii: Simultaneous Dynamics-Based Visual Inspection Using Modal Parameter Estimation, Journal of Robotics and Mechatronics, Vol.23, No.1, pp.180-195 (2011)
- Hua Yang, Takeshi Takaki, and Idaku Ishii: Dynamics-Based Visual Inspection through Real-Time Modal Analysis, Proc. IEEE Int. Conf. on Robotics and Automation, pp.5979-5984, 2011.