RESEARCHES
Smart Vision & Robotic Sensing

Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
CFPE (Compact & Flexible Processing Element) Vision Chip
 |
 |
 |
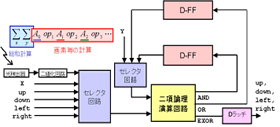
In this study, we propose the CFPE (compact and flexible
processing element) architecture as a vision chip architecture that enables various visual processings on the same architecture and combines high speed
and the high accumulation.
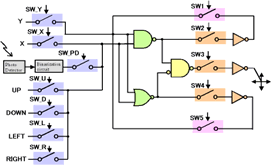
In the proposed architecture,
the processing element of each pixel is simplified based
on the following 3 design policies, and the integration of
the vision chip is improved; 1) pixel local operation by recurrent processing, 2) circuit sharing of pixel local operation and summation operation, and 3) simplification of circuit element.
In the case of the prototype 256 x 256 pixel vision chip, the
execution time is 140 us to calculate the center of gravity
and 220 microsecond to calculate all the 25 HLAC features. This
implies that our developed vision chip enables high-speed
image feature extraction in the order of sub-milliseconds.
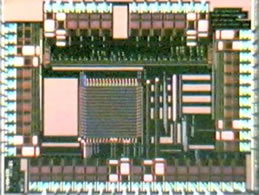
A 16 x 16 pixel prototype vision chip based on the CFPE architecture is integrated on a 2.5 mm x 2.0 mm chip using a 0.35 um
CMOS process. Since the pixel is compactly designed in an
area of 33.0 um x 33.0 um, 100,000 pixels can be integrated
in a chip area of 1 cm x 1 cm.