RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Network-Type High-Speed Vision System – INCS
 |
 |
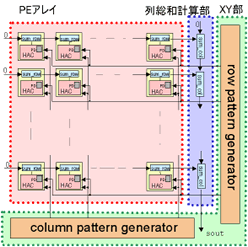
and moment features extraction algorithms are implemented in the proposed architecture in order to achieve high-speed image processing and enhanced pixel integration. The prototype chip using 0.35um CMOS DLP/TLM(3LM) process has been developed, with 64×64 pixels integrated on a 5mmx5mm chip. The area per pixel is 44umx48um, hence, 47,000 pixels can be integrated in the chip area of 1cmx1cm. The maximum power consumption of the prototype chip is approximately 400mA.
The object-counting experiment was performed, in which, the objects are arranged on a high-speed rotation drum, and the number of objects are recognized and counted using the HLAC feature.
 |
|

 |
MPEG movies(2.9M) counting vertical/horizontal rectangles |
 |
MPEG movies(2.9M) counting big/small circles |