RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
High-Speed Vision Platform – H3 Vision
 |
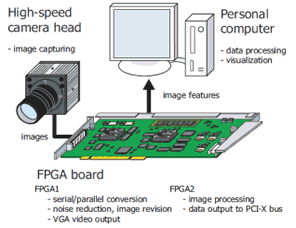 |
In H3 Vision image processing, the high-speed camera head can capture images at the set frame rate and spatial resolution and obtains image data. An enormous volume of image information, over 1 Gbytes/s, is transferred to the dedicated FPGA board by high-speed serial communications. In the hardware real-time image processing, the FPGA board processes all the pixels of the images to compressed image features, such as moment features correlated for the object’s size, position, orientation, and other parametric values required for image recognition. The processed information is then transferred to the PC memory through the PCI-X bus. Based on the transferred image features, the PC executes final processing and displays the processing results.
The dedicated FPGA board has two FPGA devices (Xilinx XC2VP100; FPGA1 and FPGA2) that the user can use to implement arbitrary circuits for image processing. Thus, H3 Vision system is not a specific processing system. Rather, it is a high-speed vision platform that can realize various kinds of image processing. The left tableshows the specifications of the dedicated FPGA board. FPGA1 executes serial-to-parallel conversion of the captured images, image correction (fixed-pattern noise removal and shading correction), and VGA external output. FPGA2 executes user-installed arbitrary image processing on the image information transferred from FPGA1 through a 160-bit bus and also communicates with the PC via the PCI-X bus. The DDR-SDRAM memory directly connected to FPGA2 can temporarily store the image information necessary for processing.
The H3 Vision system is a high-speed vision platform equipped with both high-speed realtimecapabilities and a high spatial resolution. Consequently, the system is expected to become a powerful measurement and analysis system in a variety of fields, including factory automation, robotic, multimedia, biomedical, and biological fields.