RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
Real-Time Vibration Imaging Using a DMD Device
 |
 |
 |
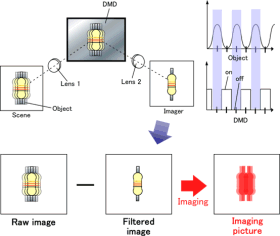
In this study, we develop a vision system which enabled the multiplex frequency measurement using a DMD (Digital Micro-mirror Device), and we are aimed at realizing the realtime vibration distribution imaging.
In the proposed method, only the frequency to appoint of targets vibrating fast is extracted and it is made visible. When the DMD arranged in the front of an imager is controlled in f[Hz], only the targets including the frequency is filtered. Therefore, by generating a differential image with the original image, only vibration of the specific frequency is made visible. In this study, we succeeded in making plural different frequency visible by changing control frequency of the DMD spatially and temporally.
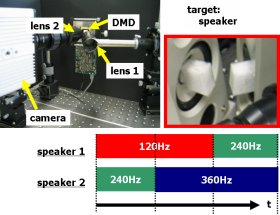
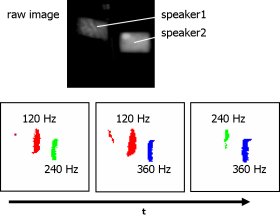
We performed vibration imaging experiments using vibration sources (speakers). We confirmed that the vibration phenomenon including plural frequency is made visible definitely.
 |
MPEG movie(7.4M) real-time vibration imaging |