研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高フレームレートデプスビジョンを用いた実時間プロジェクションマッピング
本研究では,GPUベースド高フレームレートビジョンシステムと同期された高フレームレートプロジェクタを用いて,3次元環境を強調するための可視光(RGB)パターンを投影することができるプロジェクションマッピングシステムを開発する.
提案システムは,500fpsで512×512デプス画像を実時間で取得する事が可能である. 近赤外光(IR)のパターンを用いた8bitグレイコードパターン投影法の処理をGPUボードへ実装することにより,デプス画像の処理が高速化されている. 取得されたデプス画像を用いることで,投影される適切な可視光(RGB)パターンが強調表示アプリケーションのために実時間で生成される. 3次元環境には,環境が時間変化してもピクセル幅レベルで一致する3次元環境を強調表示する可視光(RGB)パターンが投影される.
(1)デプスベースドカラーマッピング,(2)拡張現実水準器といった時間変化する3次元環境に対する強調表示する実験を通して,提案システムの有効性を示した.
提案システムは,500fpsで512×512デプス画像を実時間で取得する事が可能である. 近赤外光(IR)のパターンを用いた8bitグレイコードパターン投影法の処理をGPUボードへ実装することにより,デプス画像の処理が高速化されている. 取得されたデプス画像を用いることで,投影される適切な可視光(RGB)パターンが強調表示アプリケーションのために実時間で生成される. 3次元環境には,環境が時間変化してもピクセル幅レベルで一致する3次元環境を強調表示する可視光(RGB)パターンが投影される.
(1)デプスベースドカラーマッピング,(2)拡張現実水準器といった時間変化する3次元環境に対する強調表示する実験を通して,提案システムの有効性を示した.
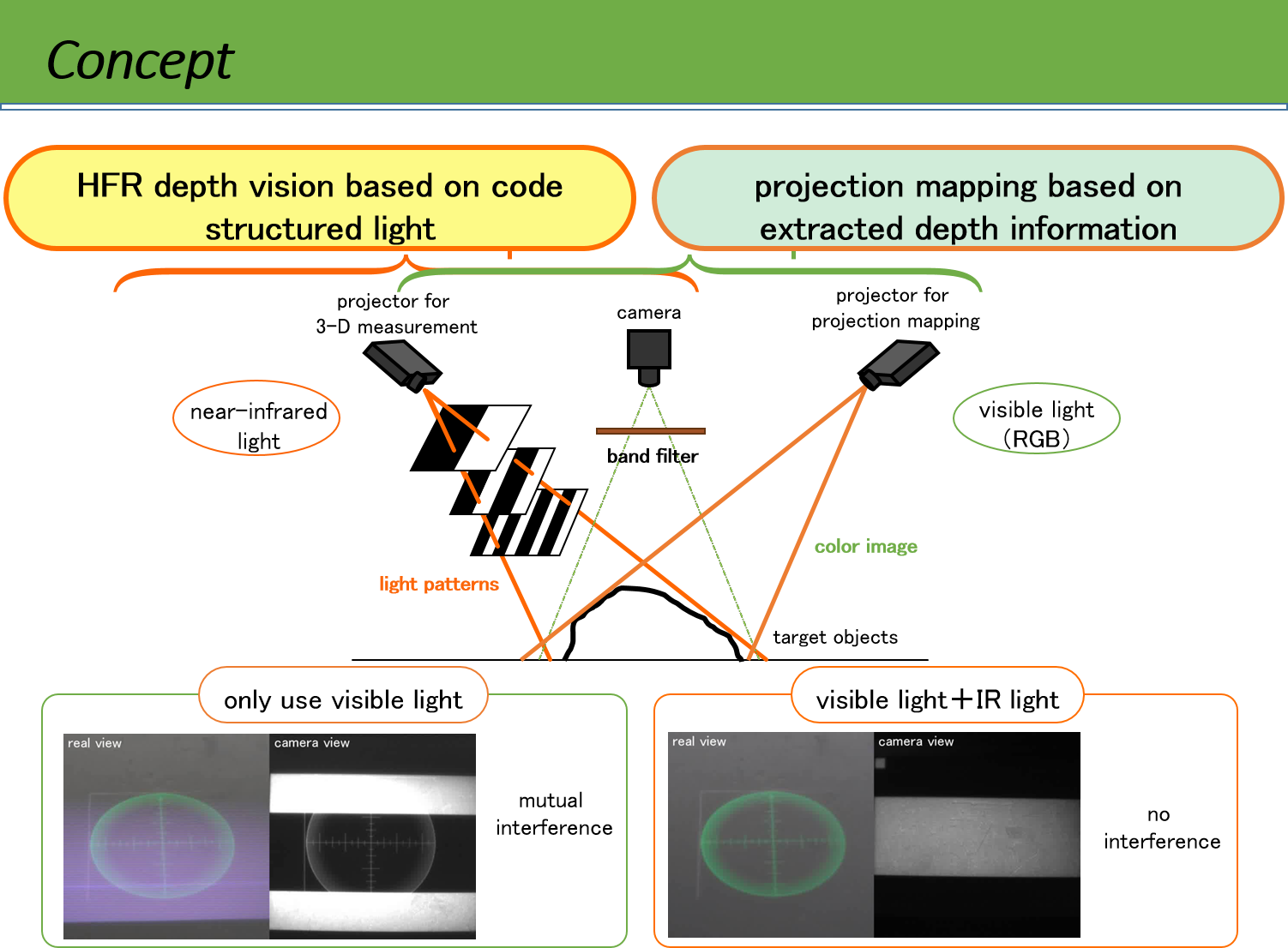 |
Fig. 1: Concept of our system. |
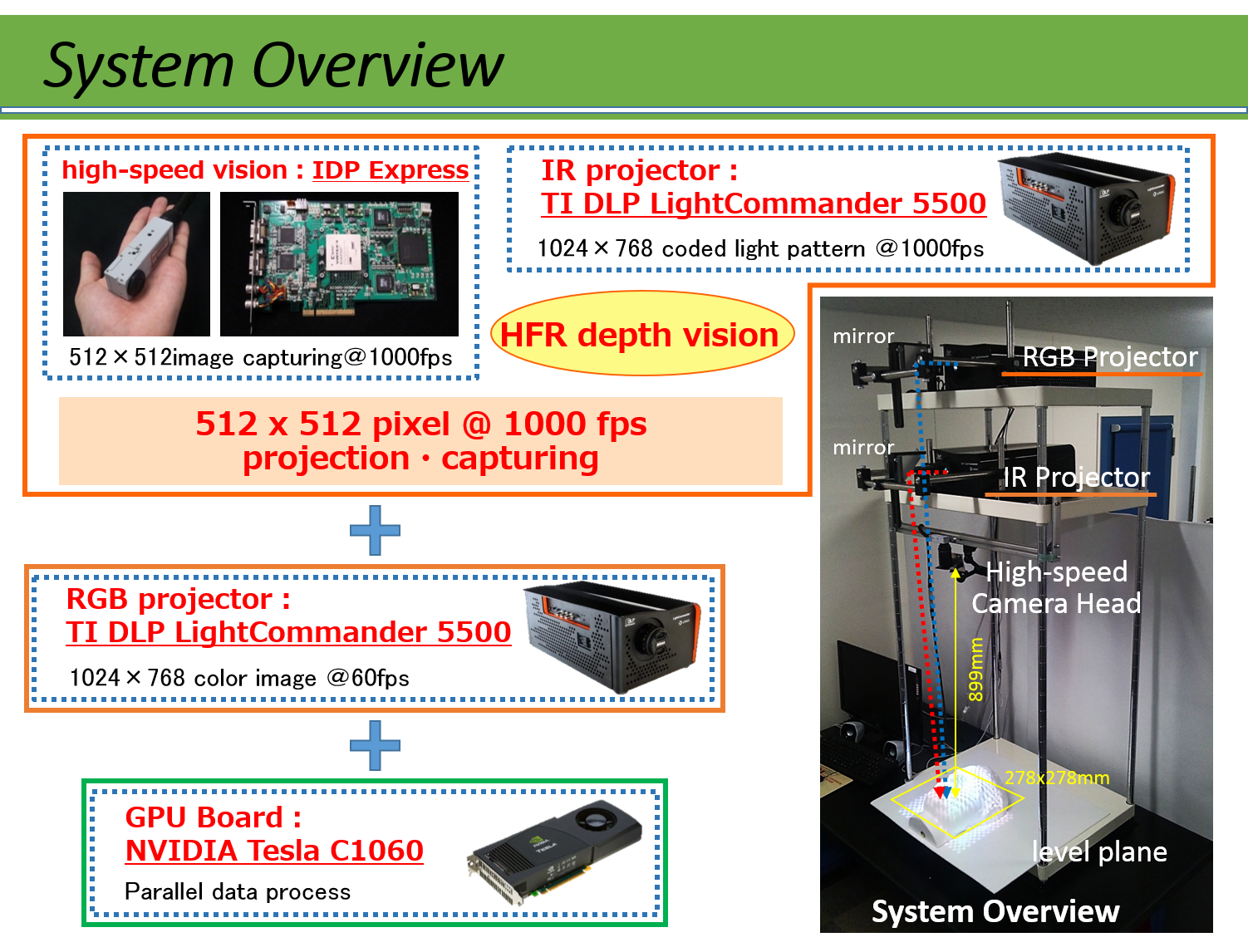 |
Fig. 2: System overview. |
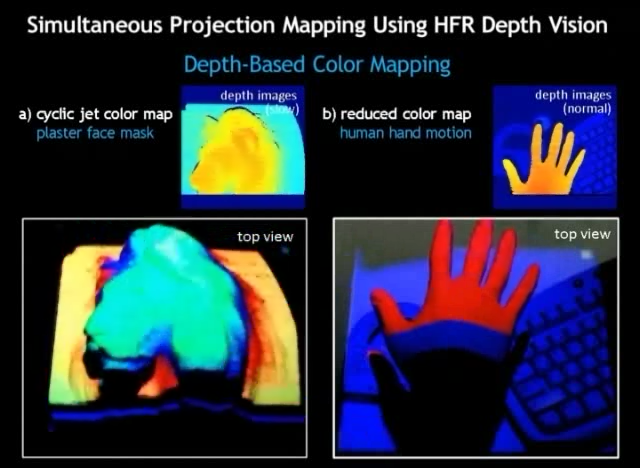 |
| WMV movie (1.33M) Demo video for simultaneous projection mapping using HFR depth vision |
Reference
- Jun Chen, Takashi Yamamoto, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii, Real-time Projection Mapping Using High-frame-rate Structured Light 3-D Vision, SICE Journal of Control, Measurement, and System Integration, Vol.8, No.4, pp.265-272 (2015)
- Jun Chen, Takashi Yamamoto, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Simultaneous Projection Mapping Using High-frame-rate Depth Vision, Proc. IEEE Int. Conf. on Robotics and Automation, pp.4506-4511, 2014.