RESEARCHES
Smart Vision & Robotic Sensing

Professor, Robotics Laboratory
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Smart Innovation Program, Graduate School of Advanced Science and Engineering
Hiroshima University
Idaku ISHII
- >> Research Contents
- In order to establish high-speed robot senses that are much faster than human senses, we are conducting research and development of information systems and devices that can achieve real-time image processing at 1000 frames/s or greater. As well as integrated algorithms to accelerate sensor information processing, we are also studying new sensing methodologies based on vibration and flow dynamics; they are too fast for humans to sense.
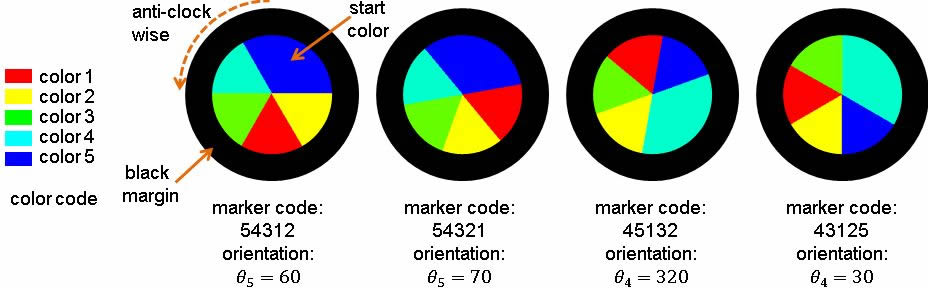
Fast Motion Capture Using Pie-Shaped Markers
In this study, we developed a real-time high-speed color vision system to track multi-colored pie-shaped markers in 512×512 images at 2000 fps.
Our color vision system has six cell-based labeling circuits that can calculate the 0th and 1st moment features of color-labeled regions during a single scan of a 512×512 image divided into 4096 8×8cells.
Our system examines the geometric distribution of five color regions in each pie-shaped marker using their 0th and 1st moment features, and it can simultaneously extract the unique marker codes, locations, and orientations of multiple pie-shaped markers in a 512×512 image at 2000 fps.
To evaluate the proposed system, we performed 2000 fps multi-color marker tracking of 512×512 pixel images on a rotating plane and a rotating can, on which multiple color markers were attached.
 |
WMV movie(14.8M) tracking of a rotating color-pattern |
 |
WMV movie(7.5M) tracking of a rotating color-pattern |
Reference
- Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii : High Frame-rate Tracking of Multiple Color-patterned Objects, Journal of Real-Time Image Processing, doi: 10.1007/s11554-013-0349-y (online first) (2013)
- Qingyi Gu, Tadayoshi Aoyama, Takeshi Takaki, and Idaku Ishii: Fast Tracking System for Multi-colored Pie-Shaped Markers, Proceedings of International Symposium on Optomechatronic Technologies, 2012.