研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
フラフープマニピュレーション
一般的に、少ない操作自由度で多くの自由度を持つ対象を操ることは難しい。
しかし、対象の自由度が多くても、簡単な動作で一意の姿勢をとることがある。
それを利用すれば、少ない操作自由度でも、対象の動作の一部を操ることができる。
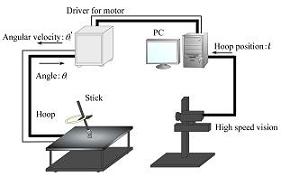
そのような運動としてフラフープの回転運動に着目し、1自由度しか持たない棒状のものでフラフープを回転させることにより一意の姿勢に安定させ、ダイナミクスを利用し位置を操作する戦略について考察する。
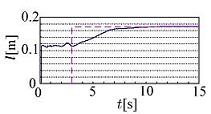
実験システムおよびフラフープを目標位置で安定させる実験の動画とその実験結果を下図に示す。
フラフープの位置を高速ビジョンにより計測し、その値より棒の角速度を決定し、棒を回転させている。
実験結果のグラフは実線がフラフープの測定位置、破線が目標位置を示している。
目標位置に応じてフラフープの位置が追従しており、目標位置付近にフラフープの位置を操ることができてた。
 |
 |

|
WMV動画(1.7 M) 目標位置が一定 |
 |
|
|
WMV動画(2.9 M) 目標位置を変化 |
 |