研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
高速ジェスチャーロボット(必ず勝つジャンケンロボット)
 |
ロボットが人間に対して必ずジャンケンに勝つためには右図に示す条件を満たす必要がある。これは、人間が手を出し始めてから手を出し終わるまでの時間(約0.2秒)に、ロボットは人間の指の状態を高速に認識し、それに対して勝つ手を高速に提示する必要があることを示す。なお、人間の手形状の認識は、3つの標点をマークされた黒い手袋を装着して行い、その3点の位置情報からグー、チョキ、パーを判別する。
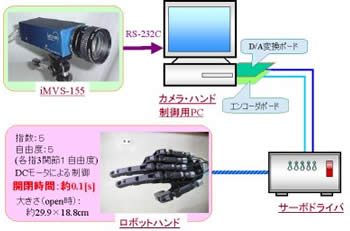
下図にシステムの構成図を示す。視覚部としてiMVS-155を用いた高速メガピクセルビジョンを適用し、ジェスチャー提示部として高速な指の開閉が可能なロボットハンドを適用した。 PCでは、視覚部で得られた高速モーションキャプチャ情報を基に人間の手の認識を行い、それに対して勝つ手を常に提示するように、サーボドライバを介してロボットハンドを制御する。
最後に実際に本システムで人間とジャンケンを行った実験の動画を示す。このように人間の高速な動作に対しても、人間のジェスチャー行動終了時にはロボットが必ずジャンケンに勝っていることがわかる。なお、ここではロボットが必ず勝つ場合のジャンケンを紹介したが、同様に必ず負けるジャンケン、必ずアイコのジャンケンも可能となっている。
 |
MPEG動画(5.0M) 必ず勝つロボット |
 |
MPEG動画(3.6M) 必ず負けるロボット |
 |
MPEG動画(3.6M) 必ずアイコのロボット |