研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
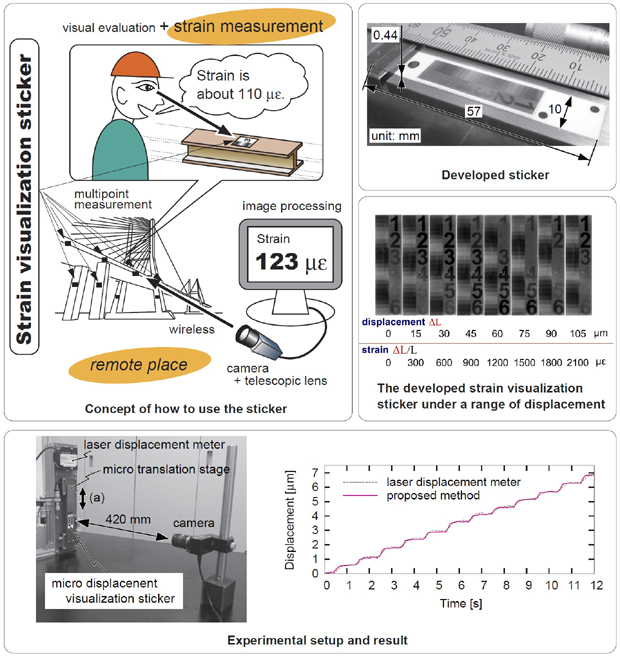
モアレ縞を用いたひずみ可視化シール
アンプ,ひずみゲージ,配線などの電気的な要素を一切用いることなく,ひずみの大きさを文字と縞模様で提示できるひずみ可視化シールを開発した.
ひずみにより生じる微小な変位に着目し,本シールはその微小変位をモアレ縞を用いて視覚的に拡大表示するものである.
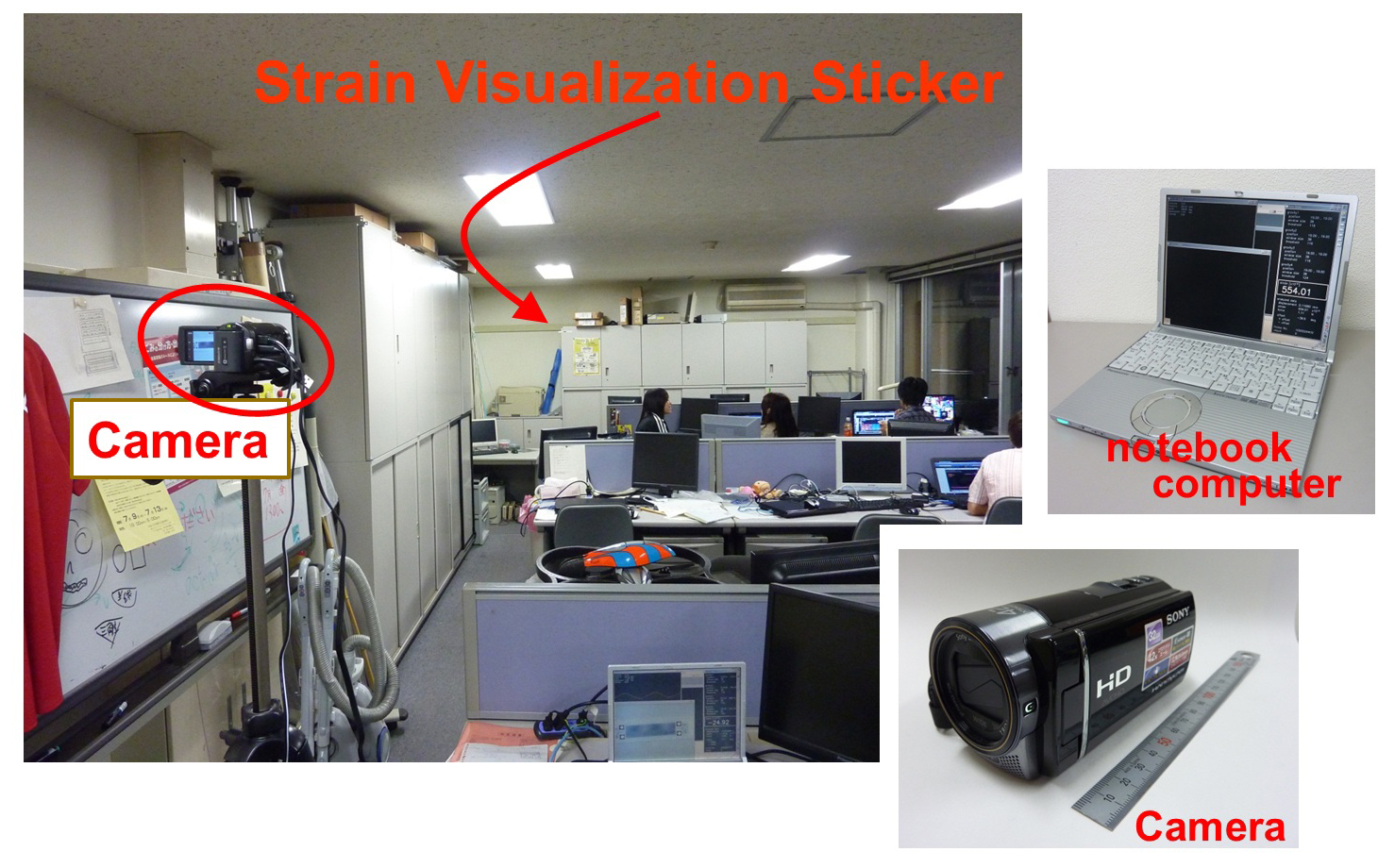
提案シールの使い方を下の図に示す.
本シールは計測対象に簡単に貼ることができ,肉眼で大まかなひずみを知ることができる.
画像処理を用いれば,詳細な値を得ることもできる.
望遠レンズを用いれば,遠隔地より計測することもできる.
このシールの構造はシンプルであり,安価に製造することができる.
ゆえに,多点計測にも適している.
 |

|
MPG動画(4.1 M) 遠隔計測 |
|
参考文献
- T. Takaki, K. Fujii, I. Ishii, S. Umemoto, H. Ohata, N. Miyamoto and T. Okamto: Strain visualization sticker using moire fringe for remote sensing, Proc. 6th Int. IABMAS Conf., pp. 2212-2217 (2012)
- S. Umemoto, H. Ohata, N. Miyamoto, T. Okamoto, T. Takaki, K. Fujii and I. Ishii: Strain measurement of bridge members using strain visualization sticker, Proc. 6th Int. IABMAS Conf. pp. 2218-2223 (2012)