研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速ビジョンに基づく細胞の形状と運動の同時解析システム
本研究では,フレームストラドリング高速ビジョンプラットフォームに複数被写体の特徴抽出アルゴリズムを実装することで,高速なマイクロ流路流れにおける細胞の形状と運動を同時計測するシステムを提案した.
これまでは,一般的なオフライン高速カメラが細胞形状計測に使用されていた.しかしながら,顕微鏡により拡大された視野内での見かけ上高速な細胞の運動を補足するにはフレーム間隔が長いため,マイクロ流路内を流れる細胞の計測可能速度はフレーム間隔の時間により制限されていた. 本研究での提案システムは,この制限を大幅に改善し,細胞の機械的特性に応じて細胞形状が変化するような毎秒数メートルのマイクロ流路流れでの実時間細胞検査ツールとして運用することが可能である. Lab-on-a-chip従事者は,良質な細胞の自動量産へ向け,大きさや形状,硬さ,その他の画像ベースのパラメータを計測することで検査すべき対象である赤血球やiPS細胞に対して,提案システムをマイクロ流路内の高速流れに対して容易に適用することが可能となる.
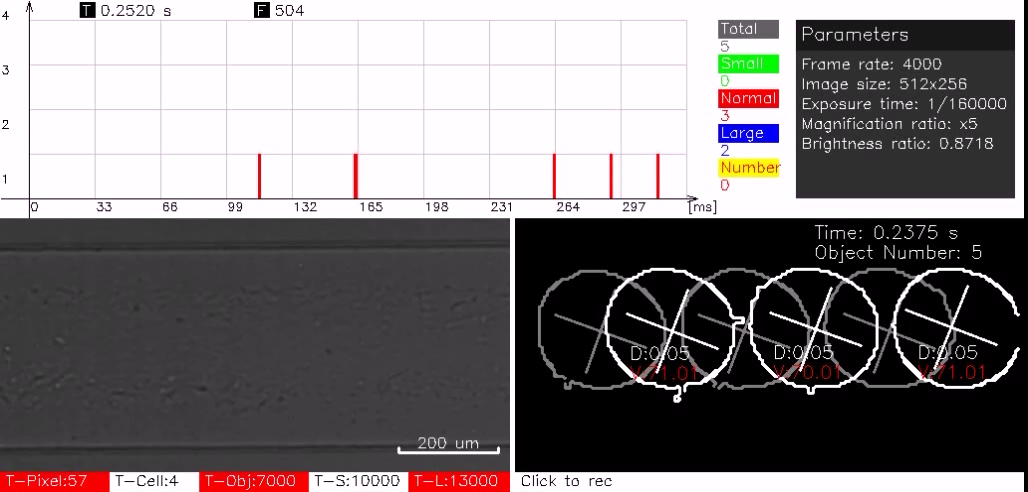
提案システムはサブミリ秒単位のわずかな時間差を持つ2つの同一視野画像の同時取得することが可能である. 2つの入力画像に対して4000fps,512×256画素画像内の複数の細胞のモーメント特徴計算を高速ビジョンに回路実装することで,実時間ビデオ処理が行われ,フレームストラドリング時間は0から0.25ミリ秒まで9.9ナノ秒ごとに設定することが可能である. 2つのカメラ入力画像間の変位が大きくなるのを避けるため,フレームストラドリング時間を適切な範囲に設定することで,構築されたフレームストラドリング高速ビジョンプラットフォームは1m/s以上の高速マイクロ流路流れにおける細胞の形状と運動の同時解析が可能である.
提案した細胞解析システムは,マイクロ流路内の高速流れにおけるウニ卵細胞の変形度と移動速度を実時間解析する実験を通して,その有効性を実証した.
System configuration and overview
Processing flow
Experiment results in I-type microchannel
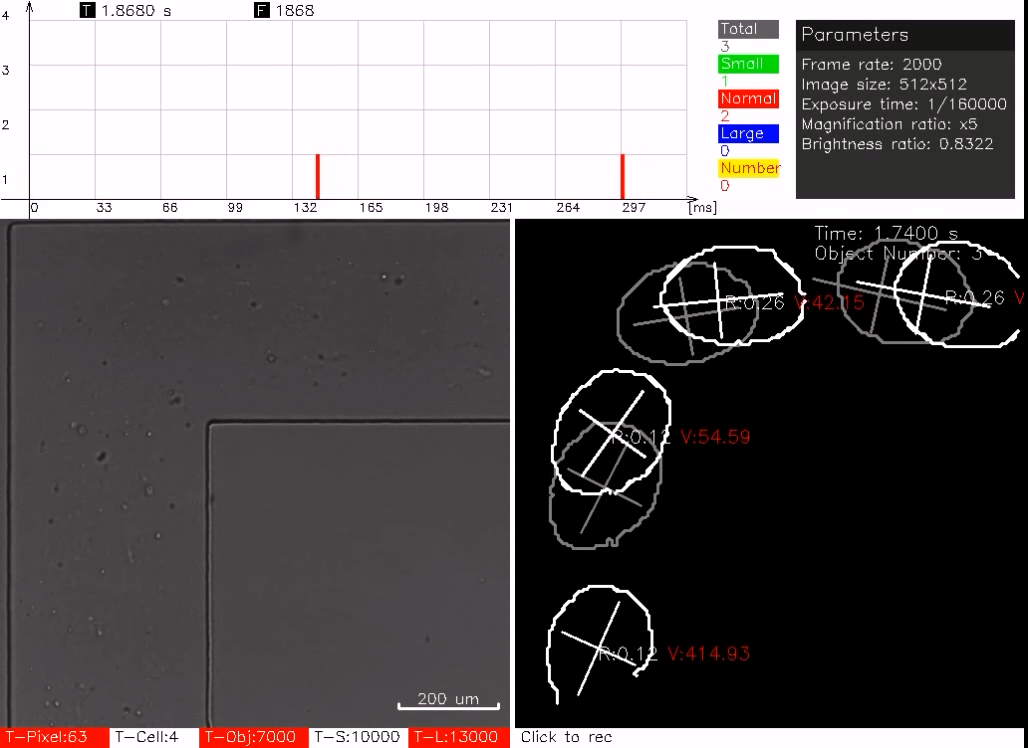
Experiment results in L-type microchannel
これまでは,一般的なオフライン高速カメラが細胞形状計測に使用されていた.しかしながら,顕微鏡により拡大された視野内での見かけ上高速な細胞の運動を補足するにはフレーム間隔が長いため,マイクロ流路内を流れる細胞の計測可能速度はフレーム間隔の時間により制限されていた. 本研究での提案システムは,この制限を大幅に改善し,細胞の機械的特性に応じて細胞形状が変化するような毎秒数メートルのマイクロ流路流れでの実時間細胞検査ツールとして運用することが可能である. Lab-on-a-chip従事者は,良質な細胞の自動量産へ向け,大きさや形状,硬さ,その他の画像ベースのパラメータを計測することで検査すべき対象である赤血球やiPS細胞に対して,提案システムをマイクロ流路内の高速流れに対して容易に適用することが可能となる.
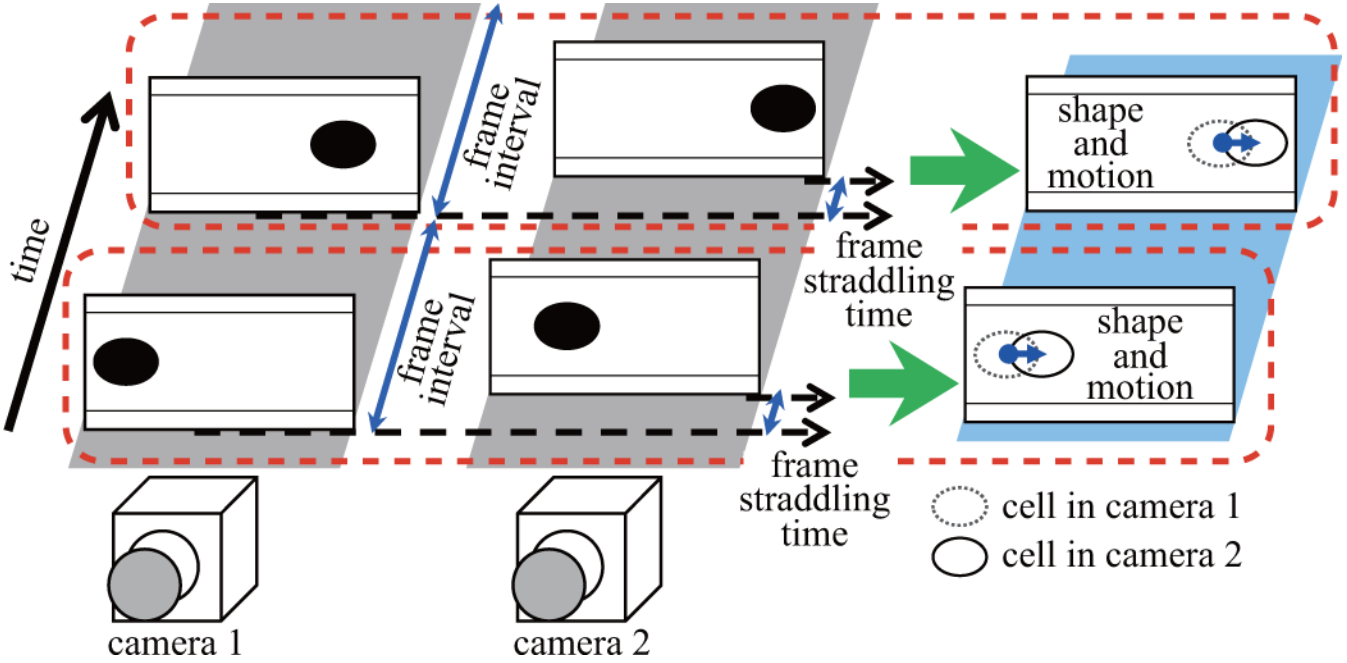 |
Fig. 1: The frame-straddling nultiobject feature extraction concept. |
提案システムはサブミリ秒単位のわずかな時間差を持つ2つの同一視野画像の同時取得することが可能である. 2つの入力画像に対して4000fps,512×256画素画像内の複数の細胞のモーメント特徴計算を高速ビジョンに回路実装することで,実時間ビデオ処理が行われ,フレームストラドリング時間は0から0.25ミリ秒まで9.9ナノ秒ごとに設定することが可能である. 2つのカメラ入力画像間の変位が大きくなるのを避けるため,フレームストラドリング時間を適切な範囲に設定することで,構築されたフレームストラドリング高速ビジョンプラットフォームは1m/s以上の高速マイクロ流路流れにおける細胞の形状と運動の同時解析が可能である.
提案した細胞解析システムは,マイクロ流路内の高速流れにおけるウニ卵細胞の変形度と移動速度を実時間解析する実験を通して,その有効性を実証した.
System configuration and overview
 |
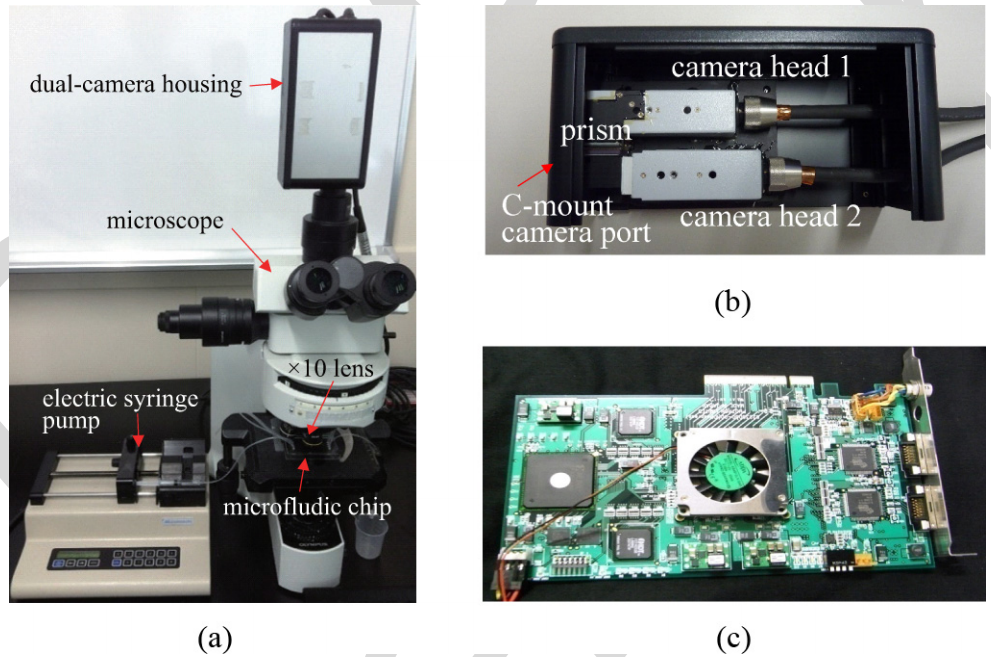 |
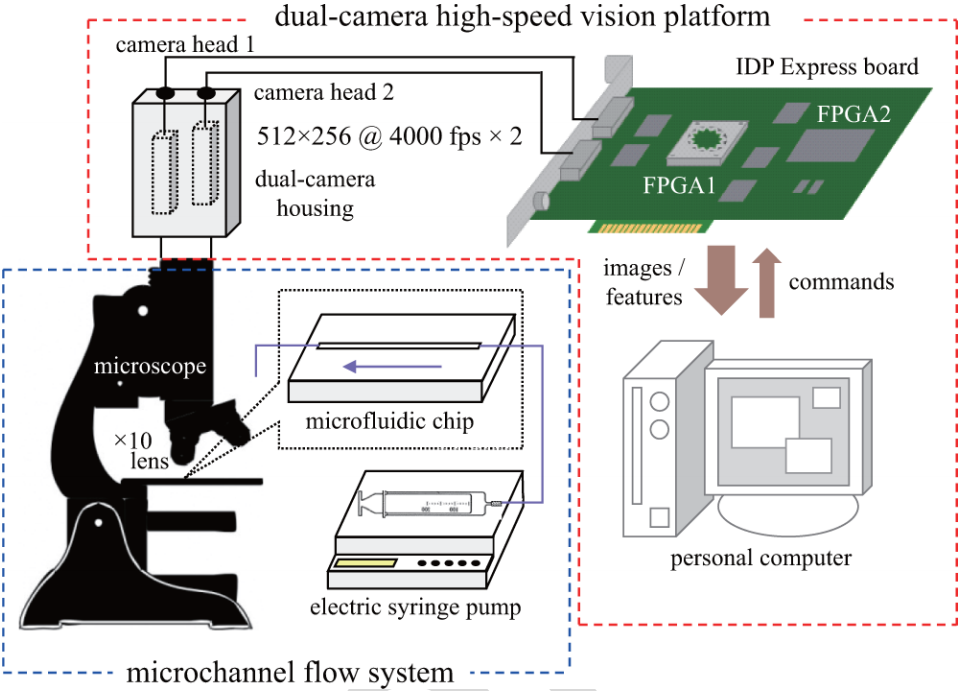
Fig. 2: System configuration. |
Fig. 3: System Overview. |
Processing flow
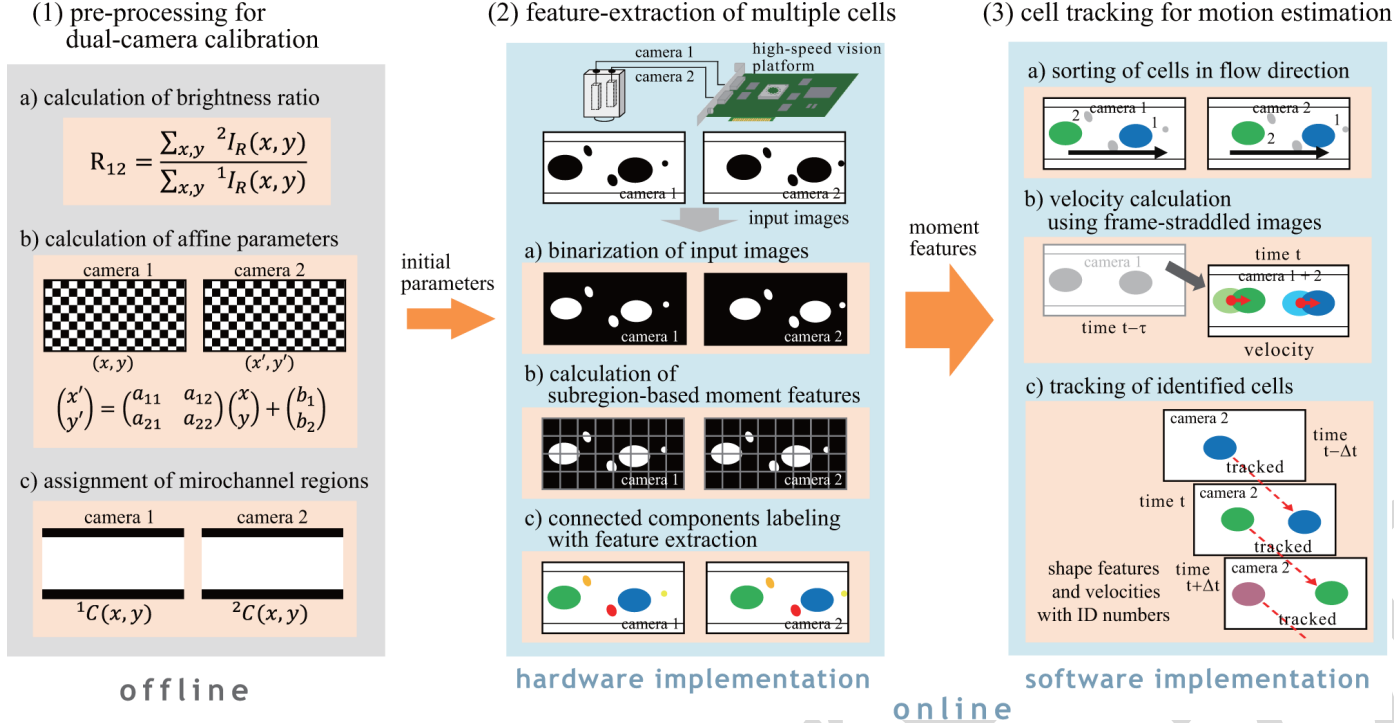 |
Fig. 4: Flow chart of the implemented algorithms. |
Experiment results in I-type microchannel
 |
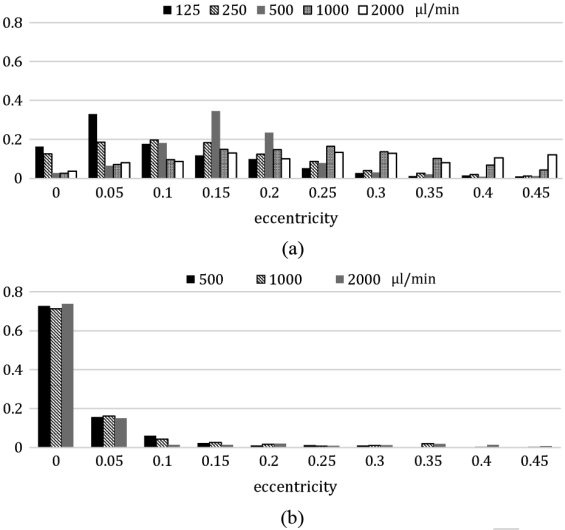 |
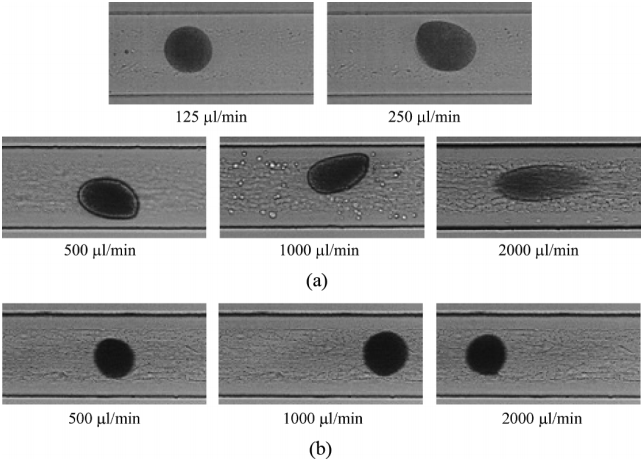
Fig. 5: Snapshots of sea urchin egg cells when observing them at different flow rates. (a) One-day-old egg cell. (b) Bouin’s fixed egg cell. |
Fig. 6: Eccentricity histograms for sea urchin egg cells when observing them at different flow rates. (a) One-day-old egg cell. (b) Bouin’s fixed egg cell. |
 |
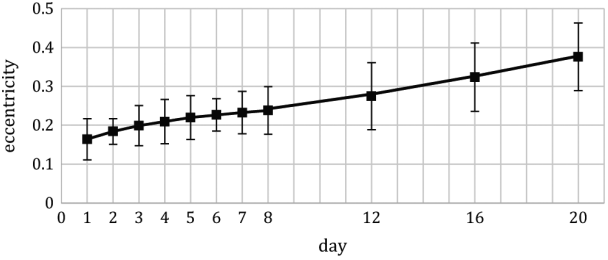 |
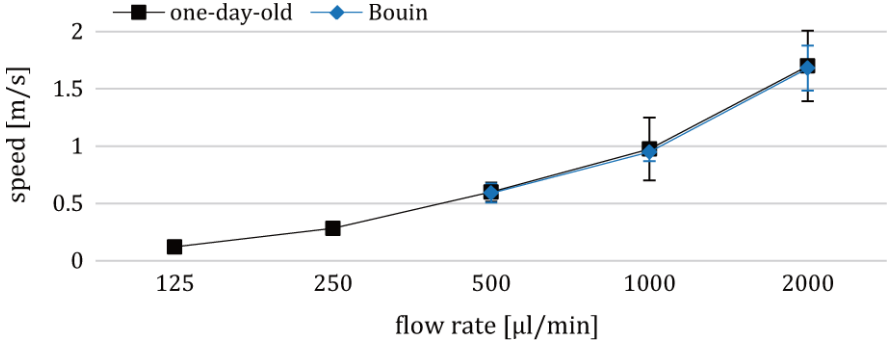
Fig. 7: Speeds of sea urchin egg cells when observing them at different flow rates. |
Fig. 8: Eccentricities of aging sea urchin egg cells. |
 |
WMV movie(21.3M) recorded video for 250 ul/min flow (30/4000 replay) |
Experiment results in L-type microchannel
 |
|
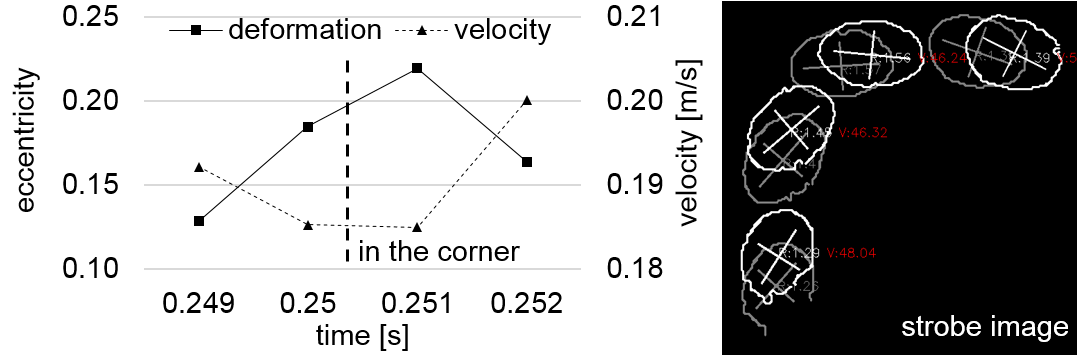
Fig. 9: Eccentricities and velocities of sea urchin eggs flowing in an L-type microchannel at 250 ul/m. |
|
 |
MPG movie(5.3M) recorded video for 100 ul/min flow (30/2000 replay) |