研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
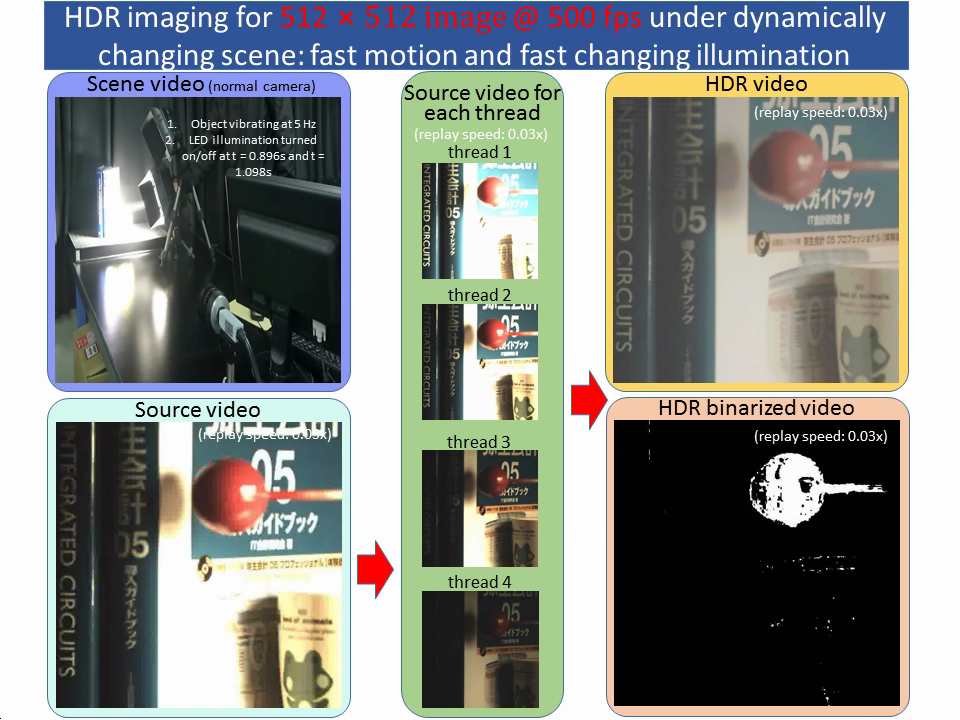
高フレームレート画像の実時間ハイダイナミックレンジ合成
本研究では,実環境のダイナミックレンジがカメラのダイナミックレンジの制限を超えている場合でもロバストな画像処理を可能とするための高フレームレートかつハイダイナミックレンジな画像の取得法を提案した.4つの異なった露光時間で撮影されたローダイナミックレンジなシーケンシャル画像から高フレームレートかつハイダイナミックレンジな画像を500コマ/秒で取得する撮像システムを構築した.ローダイナミックレンジ画像のそれぞれの露光時間は,高速仮想マルチスレッド露光時間制御モジュールにより自動的に制御される.
自動露光時間制御システムは,4つのローダイナミックレンジ画像の露光時間の適切な設定をそれぞれ125コマ/秒で同時に行うため,仮想的な4つのスレッドでそれぞれ動作し,露光時間はそれぞれのスレッドの画像に対応した飽和比率によって制御される.こうした処理を高速化するため,GPUボード上へアルゴリズムを実装し,500コマ/秒でハイダイナミックレンジ画像を実時間取得することを実現している. LEDライトが5Hzで高速点灯する条件下での撮像実験を通して,提案システムを検証した.
自動露光時間制御システムは,4つのローダイナミックレンジ画像の露光時間の適切な設定をそれぞれ125コマ/秒で同時に行うため,仮想的な4つのスレッドでそれぞれ動作し,露光時間はそれぞれのスレッドの画像に対応した飽和比率によって制御される.こうした処理を高速化するため,GPUボード上へアルゴリズムを実装し,500コマ/秒でハイダイナミックレンジ画像を実時間取得することを実現している. LEDライトが5Hzで高速点灯する条件下での撮像実験を通して,提案システムを検証した.
 |
 |
wmv movie(45.2M) HFR HDR imaging |