研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
色ヒストグラムを用いた高速対象追跡
本研究では、色ヒストグラムを用いたCamshift法を集積化に対応した形で改良した上で、高速ビジョンプラットフォームIDP Express上に回路実装することにより、512×511 画像に対して2000fpsでの動作する高速対象追跡システムを構築した。
改良型Camshift法では、回路実装において大きな負荷となる画素レベルでの乗算を行うことなく、HSV色空間,16カラービン画像に対する0次、1次、2次モーメント特徴を画素レベルの計算のみで抽出可能とし、色パターン対象の大きさ、位置、姿勢の大きさを計算するCamshift法と等価な処理を可能とした。
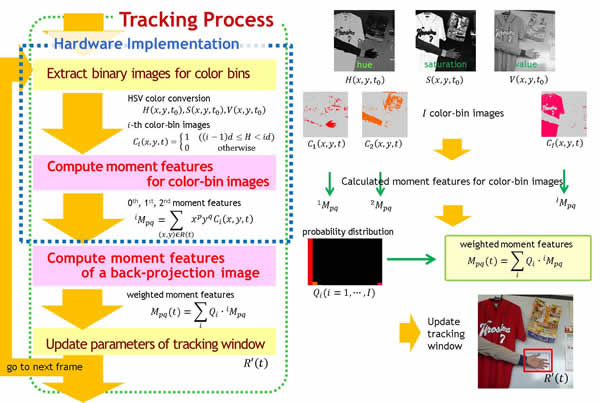
構築したシステムでは、画素レベルでの演算となる色相変換及びモーメント特徴計算をIDP ExpressボードのFPGAに回路実装し、重みづけ処理を始めとしたそれ以外の処理はPC上でのソフトウェア処理で実現し、重みづけされたモーメント特徴に基づき対象位置・大きさに対応したウィンドウを指定することにより,512×511カラー画像を用いて2000fpsでの実時間対象追跡を実現した.
パン・チルトの2自由度を持つアクティブビジョンにカメラヘッドを搭載した上で、人間の手領域に対する対象追跡実験を行い,構築システムの有効性を実際に検証した。
改良型Camshift法では、回路実装において大きな負荷となる画素レベルでの乗算を行うことなく、HSV色空間,16カラービン画像に対する0次、1次、2次モーメント特徴を画素レベルの計算のみで抽出可能とし、色パターン対象の大きさ、位置、姿勢の大きさを計算するCamshift法と等価な処理を可能とした。
構築したシステムでは、画素レベルでの演算となる色相変換及びモーメント特徴計算をIDP ExpressボードのFPGAに回路実装し、重みづけ処理を始めとしたそれ以外の処理はPC上でのソフトウェア処理で実現し、重みづけされたモーメント特徴に基づき対象位置・大きさに対応したウィンドウを指定することにより,512×511カラー画像を用いて2000fpsでの実時間対象追跡を実現した.
パン・チルトの2自由度を持つアクティブビジョンにカメラヘッドを搭載した上で、人間の手領域に対する対象追跡実験を行い,構築システムの有効性を実際に検証した。
 |
回転する色パターンの追跡 WMV動画(0.9M) 再生 |
 |
上下動する人間の手領域の追跡 WMV動画(4.3M) 再生 |
参考文献
- Idaku Ishii, Tetsuro Tatebe, Qingyi Gu, and Takeshi Takaki : Color-Histogram-Based Tracking at 2000 fps, Journal of Electronic Imaging, 21, 013010 (2012)
- Idaku Ishii, Tetsuro Tatebe, Qingyi Gu, and Takeshi Takaki : 2000 fps Real-time Target Tracking Vision System Based on Color Histogram, Proc. SPIE-IS&T Electronics Imaging 2011 meeting, Vol.7871, 787103, 2011.