研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速視覚のための実時間特徴点追跡アルゴリズム
本研究ではメガピクセルの空間解像度と1000fpsレベルの実時間特徴点追跡の実現を目指し、ハードウェア処理を念頭においた特徴点追跡アルゴリズムを導入し、これらのアルゴリズムを実際に高速ビジョンプラットフォームへ実装し、その動作検証を行った。
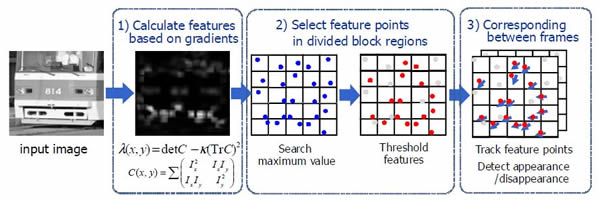
提案する特徴点追跡アルゴリズムは、画像を取得するたびに以下の3段階の処理から構成される。以下の説明ではカメラから取得する画像のサイズを1024×1024画素と仮定している。
(1) 特徴量計算
前述した提案アルゴリズムを実際に高速ビジョンシステムH3 Vision上にハードウェアとして実装し、高速実時間特徴点追跡システムを構築した。H3 Visionの構成要素の一つであるFPGAボードには特徴量計算処理と特徴点選択処理を行う回路を実装した。追跡処理は計算量が小さいため、PC側のソフトウェアにより行った。 いくつかの運動する対象に対する動作検証実験を通して、メガピクセルの空間解像度と1000fpsの実時間特徴点追跡を実現できていることを確認した。 以下に動作検証実験の様子を示す。
(1) 特徴量計算
カメラから取得された画像の各画素における特徴量
![]()
ここで、DxとDyはX方向微分とY方向微分であり、?は注目画素の8近傍における和を表す。
(2) 特徴点選択1024×1024画素領域を8×8画素の正方領域128×128=16384個に分割し、各領域内で特徴量が最大になる画素を特徴点として選択する。選択される画素数は正方領域数と等しい。各正方領域の選択処理は領域外の情報を必要としないため、正方領域に対応した並列処理が可能となるのと同時に、全画素の特徴量を記憶する必要がなくなり、記憶素子の規模を抑えることができるため、ハードウェア回路化に適した特徴点選択法といえる。
(3) 特徴点追跡処理中の画像の特徴点と、直前に取得された画像の特徴点との対応付けを行う。直前フレームの各特徴点の対応点を、選択された正方領域と隣接する正方領域の中から、特徴量の最も近い特徴点を探索する。 ここで、高速な画像取得を前提とすることにより、対応点の探索範囲を限定することで誤対応と計算コストを抑えることができ、各特徴点の間隔が十分あれば、誤対応はさらに抑えることができることを付記する。
前述した提案アルゴリズムを実際に高速ビジョンシステムH3 Vision上にハードウェアとして実装し、高速実時間特徴点追跡システムを構築した。H3 Visionの構成要素の一つであるFPGAボードには特徴量計算処理と特徴点選択処理を行う回路を実装した。追跡処理は計算量が小さいため、PC側のソフトウェアにより行った。 いくつかの運動する対象に対する動作検証実験を通して、メガピクセルの空間解像度と1000fpsの実時間特徴点追跡を実現できていることを確認した。 以下に動作検証実験の様子を示す。
 |
回転する星型対象物の特徴点追跡 MPEG動画(1.0M) 再生 |
 |
チェック柄の布の特徴点 MPEG動画(2.1M) 再生 |
 |
印刷された文字の特徴点追跡 MPEG動画(1.6M) 再生 |