研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
メガピクセル高速ビジョンプラットフォームH3 Vision
 人間の目の特性に合わせて設計されたビデオ信号を前提とする従来の画像認識技術は、その処理速度が人間の目と同レベル、もしくはそれ以下に限定される。一方で、様々な応用分野にて、人間の目では認識不可能な高速現象を実時間で認識する画像処理技術への要求が高まっている。本研究では、高解像度画像に対して秒間1000コマを超える高速フレームレートでの実時間画像処理を実現する高速ビジョンシステム H3 Vision を開発した。
人間の目の特性に合わせて設計されたビデオ信号を前提とする従来の画像認識技術は、その処理速度が人間の目と同レベル、もしくはそれ以下に限定される。一方で、様々な応用分野にて、人間の目では認識不可能な高速現象を実時間で認識する画像処理技術への要求が高まっている。本研究では、高解像度画像に対して秒間1000コマを超える高速フレームレートでの実時間画像処理を実現する高速ビジョンシステム H3 Vision を開発した。 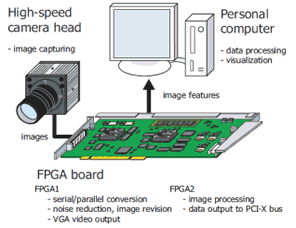 人間の能力を遥かに超える高速性と高い空間解像度を備えた高速ビジョンシステム、ハイパーヒューマンビジョンの実現を目指し、1024×1024画素の10bitカラー/グレイ画像を1000fpsで、256×256画素の画像を10000fpsで実時間処理する高速ビジョンプラットフォーム、H3 Vision (Hiroshima Hyper Human Vision) を開発した。H3 Vision は上図に示す高速カメラヘッド、専用FPGAボード、PCからなる。
人間の能力を遥かに超える高速性と高い空間解像度を備えた高速ビジョンシステム、ハイパーヒューマンビジョンの実現を目指し、1024×1024画素の10bitカラー/グレイ画像を1000fpsで、256×256画素の画像を10000fpsで実時間処理する高速ビジョンプラットフォーム、H3 Vision (Hiroshima Hyper Human Vision) を開発した。H3 Vision は上図に示す高速カメラヘッド、専用FPGAボード、PCからなる。H3 Vision の画像処理の流れとしては、まず高速カメラヘッドは設定値に応じたフレームレート及び空間解像度で画像を撮像し画像データを得る。撮像された、1秒間あたり1GBを超える膨大な容量の画像情報は、高速シリアル通信によりFPGAボードへ転送される。FPGAボードでは、大容量の画像情報を、ハードウェアによる実時間画像処理により、画像のモーメント情報や相関特徴などの画像特徴量もしくは処理・認識結果のレベルにまで容量を圧縮し、PCI-Xバスを介してPCのメモリへ転送する。PCでは、転送された画像特徴量等を基に、最終的な処理もしくは処理結果の提示等を行う。
高速カメラヘッドとしては、1024×1024画素のカラー/グレイCMOSイメージャが搭載された、フォトロン社 FASTCAM-1024PCIを採用した。 この高速カメラヘッドは、1000fpsで1024×1024画素、10000fpsで256×256画素の10bitカラー/グレイ画像を高速シリアル通信により外部出力する。 開発した専用FPGAボードは、ユーザが任意の回路を実装可能なFPGAデバイス Xilinx XC2VP100を2基 (FPGA1、FPGA2) 搭載しており,様々な画像処理を実現可能な高速ビジョンプラットフォームとして利用可能である。
参考文献
- Idaku Ishii, Taku Taniguchi, Ryo Sukemobe, and Kenkichi Yamamoto: Development of High-Speed and Real-Time Vision Platform, H3 Vision, Proc. of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS2009), pp.3671-3678, 2009.
- 石井抱、山本健吉: 超速ハイパヒューマンビジョンとその応用, 電子情報通信学会誌, Vol.90, No.10, pp.838-841 (2007)