研究内容RESEARCHES
Smart Mechanics Design & Manipulation
ロボットメカニズム & マニピュレーション

- >> 研究テーマ
- リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術として、高速ビジョンを用いたセンサベースドマニピュレーションの研究、構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指しています。
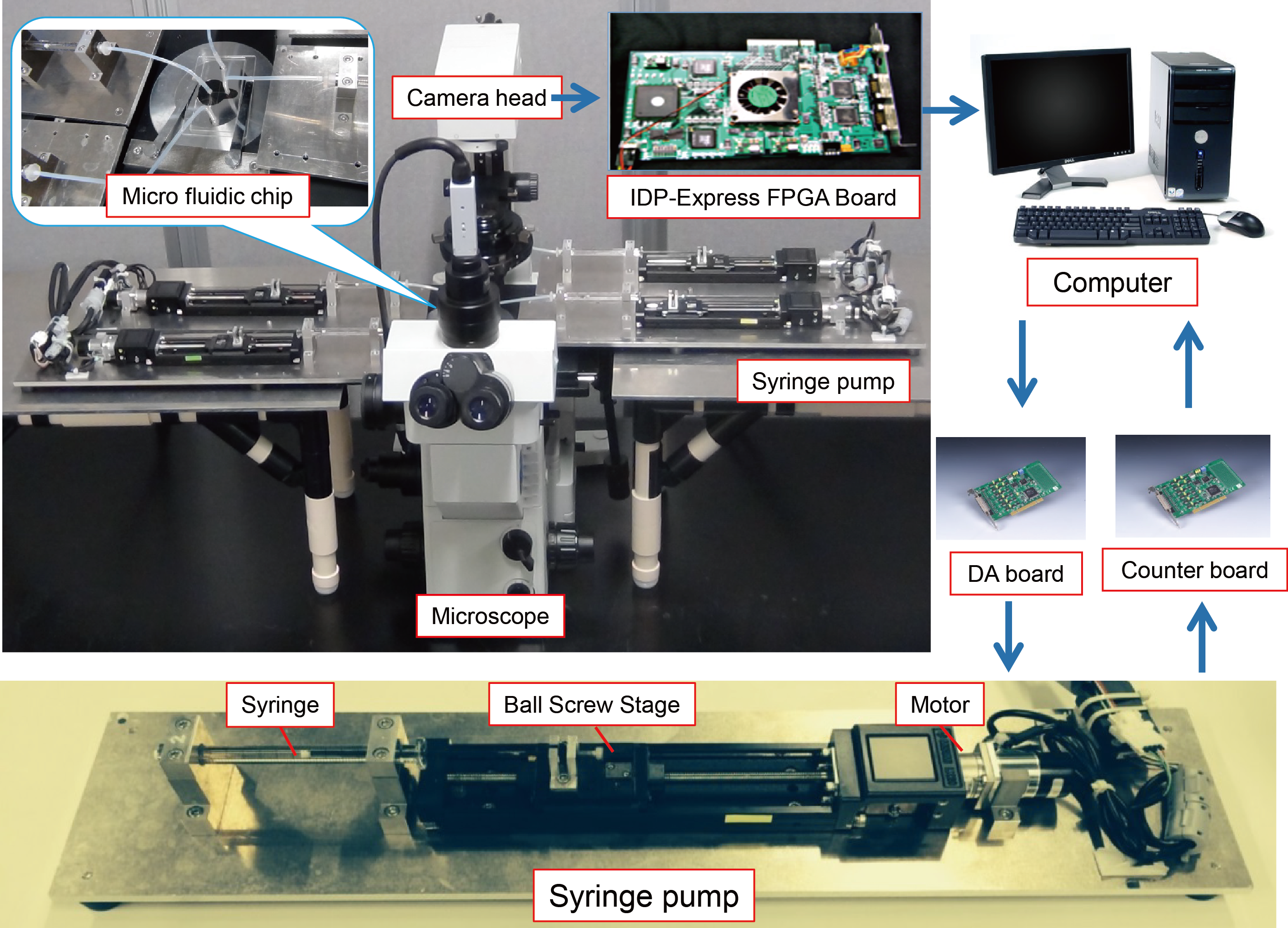
細胞解析に向けた実時間流量制御システム
マイクロシステム技術の発展に伴い,オンチップ細胞解析が行われている.
こうした細胞解析では,マイクロ流体デバイス内の流量制御が重要であり,流量制御にしばしばシリンジポンプが利用されている.
しかしながら,マイクロ流体デバイスに流量センサを取り付けることが困難であり,デバイス内の実際の流量制御を行うことが1つの課題となっている.
本研究では,マイクロ流路内の対象物の速度を計測する高速ビジョンと流速を生成するシリンジポンプシステムを組み合わせた実時間マイクロ流速制御システムを構築した.
マイクロ粒子のソーティング実験を通して,構築したシステムの有効性を検証した.
 |
 |
MP4 movie(5.0M) Microparticle sorting experiment |
参考文献
- Tadayoshi Aoyama, Amalka De Zoysa, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: Vision-based Real-time Micro Flow-rate Control System for Cell Analysis, Journal of Robotics and Mechatronics, Vol.28, No.6, pp.854-861 (2016)
- Tadayoshi Aoyama, Amalka D. Zoysa, Qingyi Gu, Takeshi Takaki, and Idaku Ishii, Real-time Flow-rate Control System for Cell Analysis, Proceedings of Advances In Robotics (AIR’15), doi: 10.1145/2783449.2783499, 2015.