研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
コード化パターン光投影に基づく500fps実時間デプスビジョン
本研究では、人間の指先が持つ情報入力能力を最大限に利用できるビジョンベースドインターフェースに向け、空間コード化パターン投影法に基づき、高速ビジョンと高速プロジェクタを組み合わせた実時間三次元ビジョンを構築し、512×512デプス画像の実時間生成及びデプス画像処理を実現した。
構築した高速デプスビジョンは、高速DLP プロジェクタ(TI DLP Light Commander 5500), 高速ビジョンプラットフォームIDP Express, GPGPUボード(NVIDIA Tesla C1060) 及びパソコンから構成される。
本研究では、512×512デプス画像を取得するために、8-bitグレイコードに基づく空間コード化パターン光投影法をGPGPUボード上に並列実装した。
DLPプロジェクタは1024×768バイナリパターンを1000fpsで投影し、プロジェクタと同期したIDP Expressは、投影パターンを8-bit濃淡512×512画像を1000fpsで取得した。
これらの結果、2ms毎つまり500fpsで三次元512×512画像を実時間取得可能とした。
実際に開発したシステムを用いて、500fpsでの512×512デプス画像を実時間計測できることを、(1) 人間の手の高速動作、(2) 水面での波面伝搬、(3) キーボードへの指先タッピング 等の実験を通して検証した。
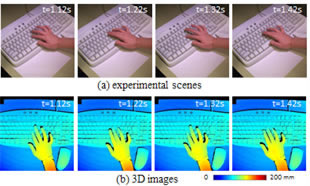
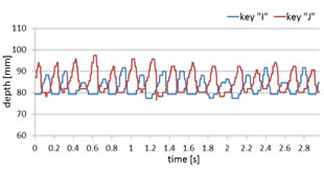
キーボードを指先で交互にタッピングしている様子(秒間7〜8回)
キーボードを指先で交互にタッピングしている様子(秒間7〜8回)
 |
500fpsデプス計測 MP4(8.4M) |