研究内容RESEARCHES
Smart Vision & Robotic Sensing
高速ビジョン・ロボットセンシング

- >> 研究テーマ
- 1秒間に1000コマ以上の実時間画像処理を実現する高速ビジョン技術を始めとして、人間の感覚能力を遥かに上回る実時間センシング技術の確立を目指した情報システム/デバイスの研究開発を行うとともに、高速化・集積化を念頭においたアルゴリズムの研究、さらには人間には感じとることが難しい振動ダイナミクス等の情報を積極的利用した新たなセンシング技術の実現を目指します。
高速光沢面スキャナ
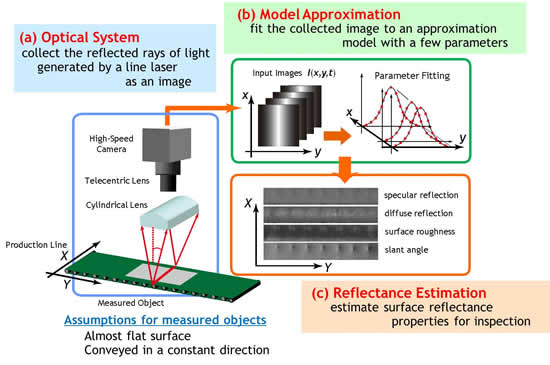
本研究では、計測ラインにおける複数方向への反射光に対する瞬時解析を行い、 搬送されるワークの表面反射特性を高速かつ高精度に検出する実時間光沢面スキャナを開発した。
本論文における実時間光沢面スキャナでは、 一定方向に搬送される平面シート状の対象を想定し、計測対象表面に対して垂直にライン光が落射されるものとして、 (a) シリンドリカル光学系により、ラインレーザによる生成された反射光を一枚の画像としてイメージャへ集約、(b) 集約された反射光画像に対する、モデル近似に基づくパラメータフィッティング、(c) 外観検査に向けた表面反射特性の推定 を実現した上で、高速ビジョンハードウェアによる実時間処理を行い、表面反射特性を瞬時に推定することを可能とした。
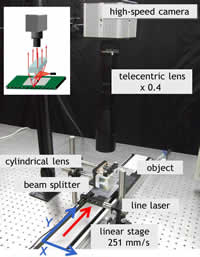 開発した実時間光沢面スキャナは、シリンドリカルレンズを含む光学系、搬送リニアステージ、高速ビジョンプラットフォームH3 Vision から構成される。
H3 Visionには、列毎に表面反射特性パラメータを計算する回路をFPGA上に実装することにより、1000fpsでキャプチャされた濃淡10-bit 1024×1024画素画像に対して、全ての1024個の短冊領域に対応した表面反射特性が1000 fpsで実時間計算できるものとした。
開発した実時間光沢面スキャナは、シリンドリカルレンズを含む光学系、搬送リニアステージ、高速ビジョンプラットフォームH3 Vision から構成される。
H3 Visionには、列毎に表面反射特性パラメータを計算する回路をFPGA上に実装することにより、1000fpsでキャプチャされた濃淡10-bit 1024×1024画素画像に対して、全ての1024個の短冊領域に対応した表面反射特性が1000 fpsで実時間計算できるものとした。
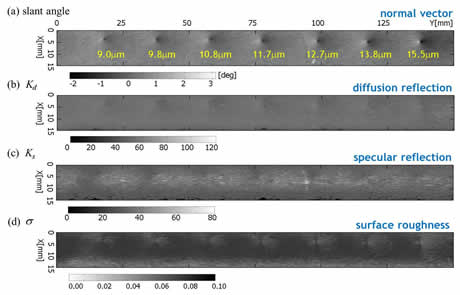
空間的な表面反射特性の変化を捉える実験として、打痕のある板厚0.7mm の平面金属プレス部材の表面反射特性を計測した。 プレス部材には20mm 間隔で7つの打痕があり、それらの高さは順に 9.0, 9.8, 10.8, 11.7, 12.7, 13.8, 15.5μm である。この金属プレス部材のうち、打痕を含む 15mm×150mm の領域を0.7秒で走査し、その表面反射特性を実時間推定し、 人間の目視では発見が難しい微小な打痕を高速かつ実時間で検出できることがわかった。
本論文における実時間光沢面スキャナでは、 一定方向に搬送される平面シート状の対象を想定し、計測対象表面に対して垂直にライン光が落射されるものとして、 (a) シリンドリカル光学系により、ラインレーザによる生成された反射光を一枚の画像としてイメージャへ集約、(b) 集約された反射光画像に対する、モデル近似に基づくパラメータフィッティング、(c) 外観検査に向けた表面反射特性の推定 を実現した上で、高速ビジョンハードウェアによる実時間処理を行い、表面反射特性を瞬時に推定することを可能とした。
空間的な表面反射特性の変化を捉える実験として、打痕のある板厚0.7mm の平面金属プレス部材の表面反射特性を計測した。 プレス部材には20mm 間隔で7つの打痕があり、それらの高さは順に 9.0, 9.8, 10.8, 11.7, 12.7, 13.8, 15.5μm である。この金属プレス部材のうち、打痕を含む 15mm×150mm の領域を0.7秒で走査し、その表面反射特性を実時間推定し、 人間の目視では発見が難しい微小な打痕を高速かつ実時間で検出できることがわかった。
 金属板の検査 MP4動画(3.6M) |
 |
参考文献
- 石井抱, 角田真一, 山本健吉, 高木健 : 表面反射特性推定に基づく実時間光沢面スキャナの開発, 日本機械学会論文集(C編), Vol.76, No.763, pp.603-610 (2010)
- Idaku Ishii, Shin-ichi Tsunoda, and Kenkichi Yamamoto : High-speed Glossy Surface Scanner with Estimation of Surface Reflectance Properties, Proc. Annu. Conf. IEEE Industrial Electronics Society, pp.2089-2094, 2009.